| New Products |
|
|
●新規価格
●アップグレード価格 |
Ultimate:1,800,000円 Driving Sim:1,280,000円
Advanced:970,000円 Standard:630,000円
Ultimate: 900,000円 Driving Sim:640,000円
Advanced:485,000円 Standard:315,000円 |
●リリース 2016年3月
UC-win シミュレーション |
|
|
| UC-win/Road・VRセミナー |
| ●開催日 : |
2016年 1月 19日(火)名古屋
2016年 2月 4日(木)大阪
2016年 2月 18日(木)東京
2016年 4月 21日(木)札幌 |
| ●時 間 : |
9:30〜17:35(VRエンジニア認定試験実施) |
| ●参加費 : |
1名様 \18,000 (税別) |
|
|
| UC-win/Road・Advanced・VRセミナー |
| ●開催日 : |
2016年2月 9日(火)仙台
2016年3月 3日(金)福岡
2016年5月 10日(火)金沢
2016年5月 19日(火)東京 |
| ●時 間 : |
9:30〜17:35(VRエンジニア認定試験実施) |
| ●参加費 : |
1名様 \18,000 (税別) |
|
|
|
|
| UC-win/Roadエキスパート・トレーニングセミナー |
| ●開催日 : |
2016年 1月 21日(木)〜22日(金)東京
2016年 5月24日(火)〜25日(水)福岡 |
| ●時 間 : |
1日目13:00〜17:30、2日目 9:30〜17:30
(UC-win/Roadエキスパート試験実施) |
| ※詳細はこちらをご覧ください |
|
|
|
|
| VR-Cloud®標準サポート |
VRデータのネット公開、協調設計また遠隔会議を目的により多くのユーザに使用していただけるため、VR-Cloud®のサーバ機能をUC-win/RoadのAdvanced及びUltimateバージョンに標準搭載するようにいたしました。作成中のプロジェクトを遠隔で円滑に関係者にプレゼンテーションする時や、Android端末で多くの方に見ていただくために是非VR-Cloud®の機能を利用してください。
 |
 |
| ▲図1 VR-Cloud® |
|
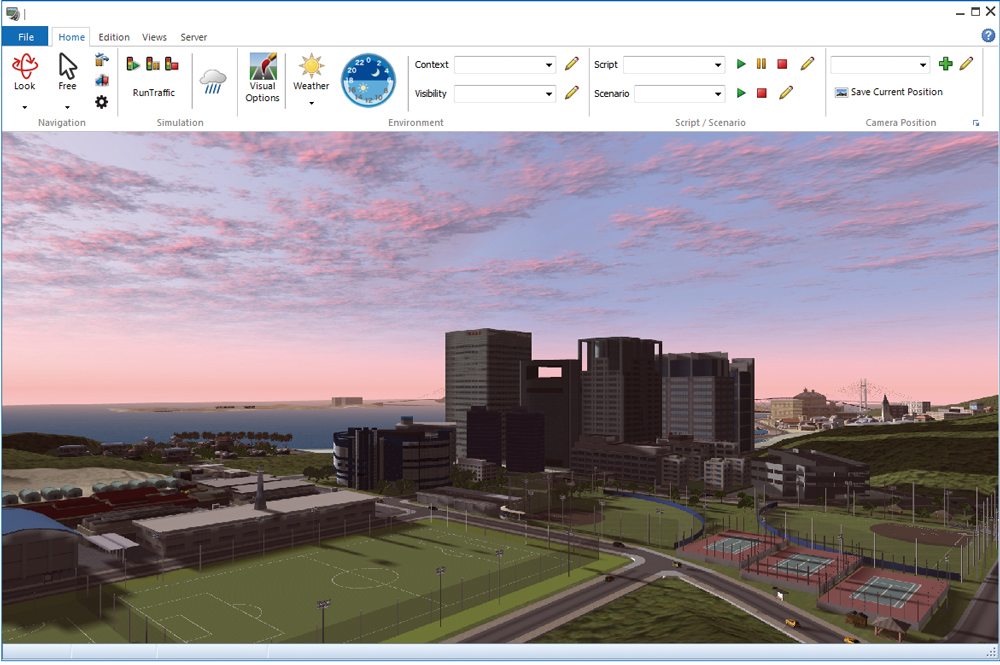
画面のメニュースタイルに「リボン」を採用しました。リボンはこれまでのメニュー、ツールバーの代わりになるもので、作業に必要なコマンドを直感的にいち早く見つけることができる様になり、作業効率が向上します。
UC-win/Roadのリボンでは、「ファイル」、「ホーム」、「編集」、「ビュー」、「サーバ」、「プラグイン」リボンで構成されます。各リボンでは関係する機能を集約し、アイコンで示すことにより、今まで煩雑だった設定画面の表示などがよりスムーズに行なえるようになります。
 |
 |
| ▲図2 メイン画面のリボンメニュー |
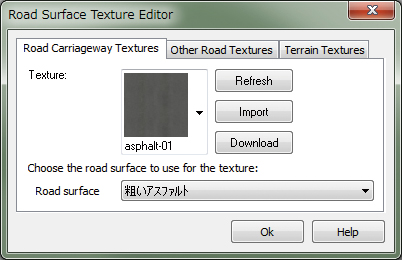
▲図3 テクスチャー設定画面 |
その他の改善として、モデルや道路や空等のテクスチャーを使用する際、テクスチャー用のフォルダーにあるファイルを変更した後、UC-win/Roadを再起動せず直ぐに使用できるようになりました。また、テクスチャー選択が可能な全画面のインタフェースを統一させ、以下の機能を全画面で使用可能になりました。
- テクスチャーリストの更新
- ファイルから追加読み込み
- Road DBからのダウンロード
|
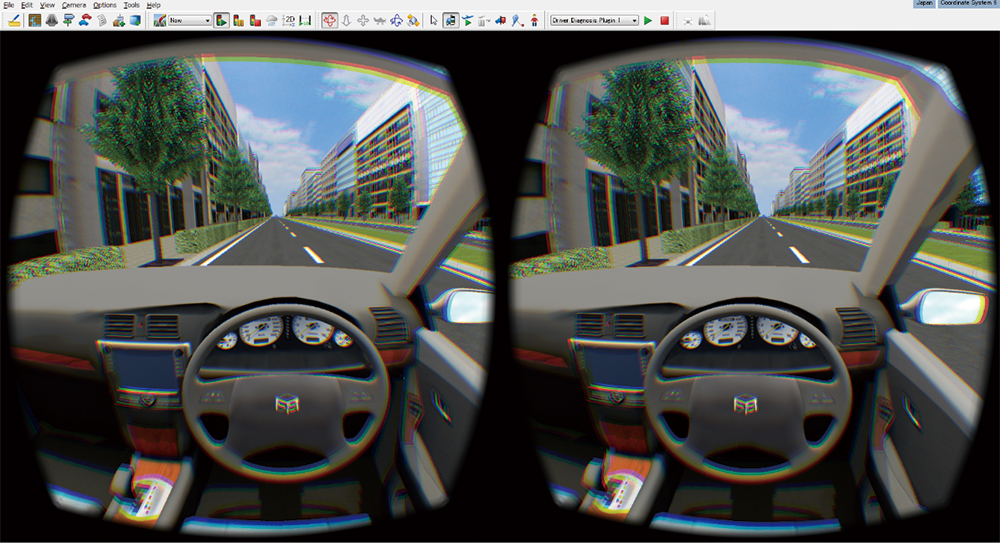
Oculus Riftは米国Oculus VR社が開発した、密閉型のHMD(Head Mounted Display)です。従来のHMDよりも広い視野角(対角110°)を実現しているのが特徴で、本デバイスを利用することで、映像に対して大きな没入感・臨場感を付与することが可能です。
 |
 |
| ▲図4 OculusRift用映像の例 |
▲図5 OculusRift DK2 |
立体視のため左右の目に対しそれぞれ、視差を考慮した異なる映像を表示します。また、両目の至近距離に配置された画面を大画面・広視野な映像として見るために、装着されたレンズとは逆に歪ませた映像を表示します。あわせて、内蔵の加速度センサとの連携も行い、体験者の頭の向きと映像の視線方向が同期する様になっているので、好きな方向を見ながらの運転シミュレーションやウォークスルー体験が行えます。
HMDは、通常のディスプレイよりもモデルの立体感や距離感を正確に把握することができるので、シミュレーションの可視化やプレゼンテーションなどに非常に有効です。
|
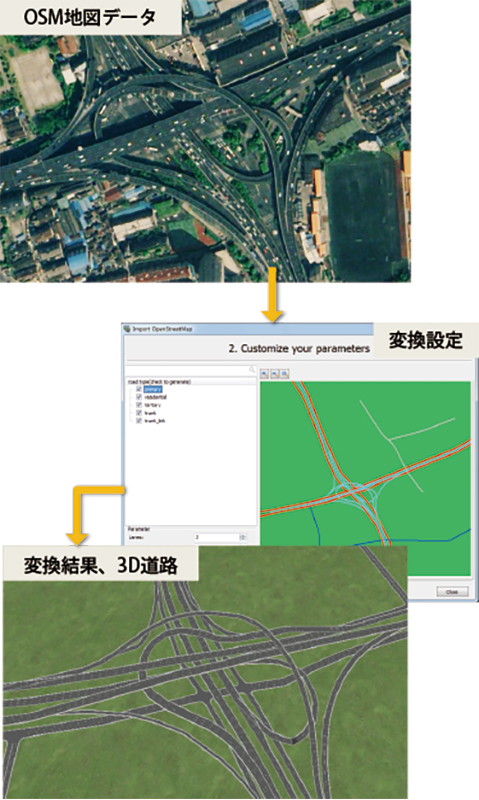
OpenStreetMap (OSM)は世界に於いてフリーで強調的な地図データです。誰でもそれをより現実に近づけることに寄与できます。OSMはGoogleマップなどの他の有償サービスに真に取って代わるものになり、多くの企業が採用しています。
そのデータフォーマットについては、基本的にノード、道路で構成されており、関係性をもっており、オープンで柔軟性があります。要素として道路、トンネル、橋梁、建物の表現が可能です。
OSMプラグインは、OSMをUC-win/Roadにリンクするために開発されました。3D仮想空間の世界にOSMデータを簡単に素早く可視化します。
今回追加した機能ではユーザが任意のOSMをインポートでき、プラグイン側で自動的にUC-win/Roadへデータをコンバートします。道路、トンネル、橋梁がサポートされ、道路名称、道路タイプ、車線幅など多くの設定が変換をカスタマイズするために有効になっています。将来に於いては、建物のインポートをサポートする予定です。 |
 |
|
▲図6 OpenStreetMapデータ変換の例 |
|
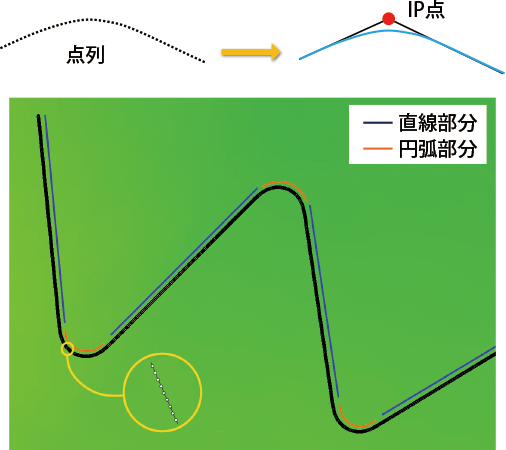
既存の道路を入力するには、航空写真を読み込んでからIP法で線形を入力して調整するなど、手間のかかる作業が必要でした。
UC-win/Road 11では、道路線形をさらに入力しやすくするため、線形算出機能を開発しました。GPSの軌跡情報等からインポート、または手動入力した点列から自動的に道路の中心線となる平面線形と縦断線形を自動的に算出します。線形算出機能を使うことで、今までよりさらに短時間でデータ作成を行うことができ、簡単にシミュレーション環境の構築が行えるようになります。
平面線形の算出
平面線形は直線、緩和曲線、円弧の三つの要素から構成されている事を利用して線形を算出します。最初のステップは点列から直線の部分と円弧の部分を検出します。
直線と円弧を検出したら、直線と円、円と円を結ぶ緩和曲線(クロソイド曲線)を計算して、直線と円弧を緩和曲線に接続します。
縦断線形の算出
平面線形と同じ方法で直線を検出して、縦断変化点を求めてから、点列に合うようにVCLを調整して道路に設定します。
|
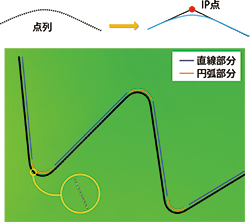 |
▲図7 点列から作成された平面線形
StreetMapデータ変換の例 |
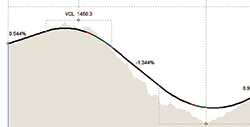 |
| ▲図8 点列から作成された縦断線形 |
|
3DSファイルへ出力する際に、XMLファイルへオブジェクトの座標情報や景観設定を出力する機能が追加されました。
出力した3DSモデルとXMLファイルを利用して、他のアプリケーションで自由度の高い活用が可能となります。
また、新たに標識、道路標示、背景、電線のオブジェクトの3DS出力に対応しました。 |
| SfM(Structure from Motion) |
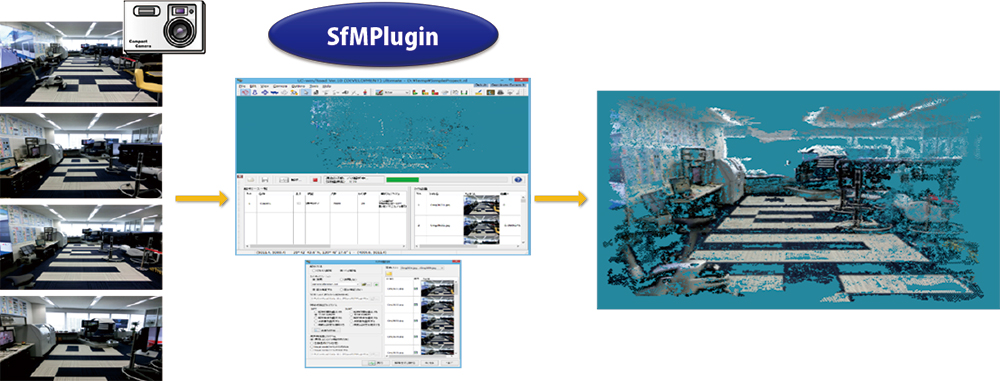
SfM(Structure from Motion)とは、多数の写真から3次元座標データ(点群データ)を生成することが可能な技術の総称です。SfMには特別な機器を必要とせず、一般的なデジタルカメラで写真を撮影するだけなので、手軽に3次元データの作成が可能です。SfMPluginは、UC-win/Roadを用いてSfM解析を実行し、解析結果をUC-win/Road上に表示するプラグインです。
SfMPluginの使用手順は、下記の通りです。
- 3次元座標データを生成したい空間を写真撮影
- 解析条件を設定し、SfM解析を実行
- 生成した点群の調整
解析には写真を撮影したカメラのレンズ歪み特性情報などが必要となりますが、写真以外に必要なファイルはSfMPluginの機能で全て作成することができます。生成した点群はUC-win/Roadの空間上に表示され、シミュレーションに活用することが可能です。このとき、点群を使用しやすいように位置・回転・スケールを調整することができます。
本プラグインの活用先として、車載カメラの映像を用いて道路や道路構造物の復元、UAVを用いて複雑な形状または大きな建造物の復元などが考えられます。
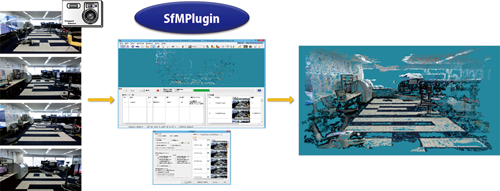 |
| ■図9 SfMPlugin概要 |
|
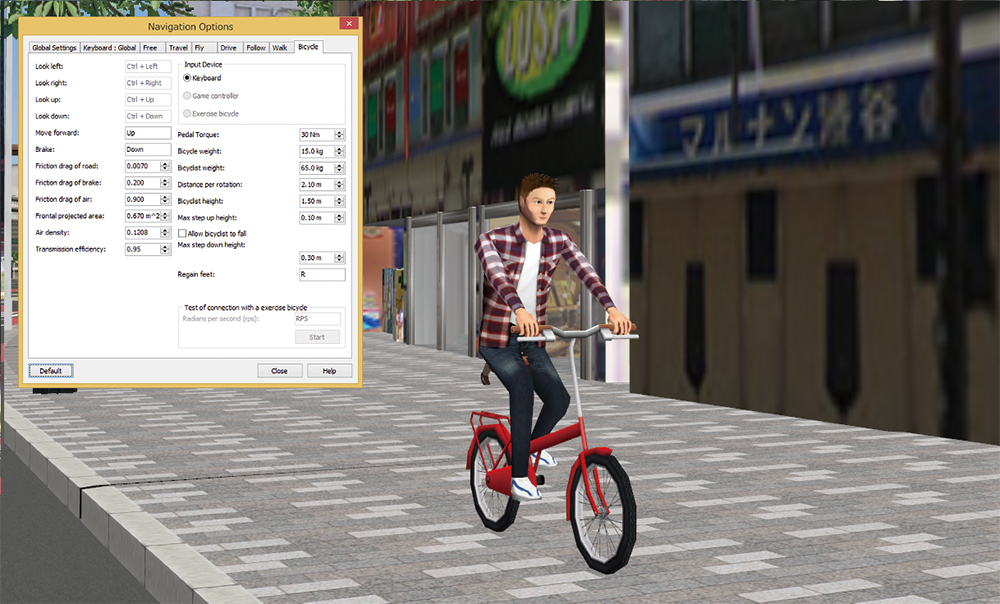
標準機能として、自転車の力学モデルをサポートしました。
既存機能での自転車走行は、自転車モデルを歩行者として定義して走行を行っていました。この方法では、自転車は歩行者の一種ですので、ペダルを漕ぐのを止めるとその場で直ちに停止します。
今回追加した自転車シミュレーションでは、慣性の法則を再現するため、エネルギー保存の法則や摩擦、空気抵抗等の力学モデルをサポートいたしました。これにより、進んでいる自転車はペダルを漕ぐのを止めても進み続けるようになり、登り坂や下り坂では傾斜に応じてスピードが変化します。ペダルを漕ぐトルクや摩擦係数、車重等のパラメータは設定が可能ですので、独自環境でのシミュレーションを行うことが可能になります。 |
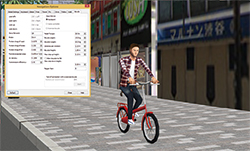 |
| ▲図10 走行イメージ |
|
自転車シミュレーションはシナリオ走行の一部として実装されています。シナリオ中のイベントの一つとして、乗車する自転車モデルや走行経路、走行の開始位置等を設定します。走行経路は事前に作成しておいたフライトパスにより指定しますが、自転車モデルは正しく地形上を走行します。キーボードやゲームコントローラを使い、自転車での走行を行ってください。
また、ログ出力プラグインによるログの出力にも対応しています。シミュレーション中の自転車の位置や傾き、スピード等の情報を出力することができますので、研究等にお役立てください。
さらに、プラグインにより、フローベル社のcycleStreetと連携することが可能です。PCと接続されたcycleStreetのペダルを漕ぐことで、シミュレーション中の自転車が前進します。cycleStreetのペダルの回転数が反映されるようになっていますので、スピードを調節することが可能です。
|
今回は以前からある影の可視化機能の高速化及び品質改良を行いました。
日照シミュレーションだけではなく、ドライビングシミュレーションやリアルタイム性が必要はシミュレーションでも使用可能となり、立体感と没入間が大きくアップします。また、性能のほかに、影のシャープネス、ぼやかし具合と濃さも設定できるようになり、晴天のみならず多少曇った状態での影も表現可能になります。
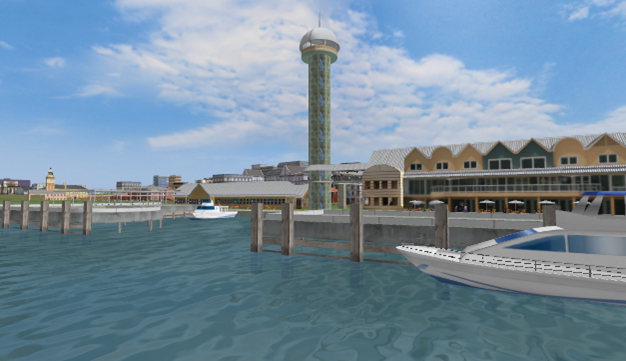
湖沼の表現についてもさざ波の表現を改善し、テクスチャ及び光の反射を動的に計算することでよりリアルな水の表現ができます。
空は、予め作成したテクスチャを使用する方法に加え、空のモデル化によって濁度(霞具合)と時刻に依存した空の色を計算する機能は利用できるようになりました。今後雲のモデル化に拡張することを予定しています。
内部レンダリングエンジンの更新を行い、拡張性も確保できました。べての画面でのレンダリング方法を統一させながら、描画プロセスの各ステップのカスタマイズが可能になします。将来またはSDKを用いて、各描画ステップ(パス)のプレ・ポスト処理を追加することが可能になり、魚眼レンズ効果やアンビエントオクルージョンやエッジブレンドと各種マスク機能などがより容易に実装できるようになります。
UC-win/Road Ver.10 影なし
 |
 |
UC-win/Road Ver.11 晴天で明るい場合
 |
|
UC-win/Road Ver.11 曇天で暗い場合
 |
▲図11 UC-win/Road Ver.10で影がない場合と、UC-win/Road Ver.11で影がある場合の表現の比較。
Ver.11では、晴れている時や曇っているなど、天気の違いによる空の明るさで変化する影の強弱がより表現豊かになっている。 |
 |
|
 |
| ▲図12 さざ波の表現 |
|
▲図13 空の表現 |
|
以上、新バージョンについて紹介させていただきました。
これからもご要望を取り入れて、改良・改善に努めてまいります。どうぞご期待ください。 |
| (Up&Coming '16 新年号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|