| DSのモーション装置は、用途により6自由度である必要のない場合もあります。Z方向の振動のみで車両振動を再現するシステムも考えられます。そのようなケースのハードウェアの種類について教えてください。 |
さまざまな種類のハードウェアにおいて実績がございます。モーション装置は、目標とする再現に応じた周波数帯域とペイロード(積載荷重)により価格が大きく変動します。たとえば、1軸でも複数の考え方があり、シミュレータ全体を上下させる装置または、ロードシミュレータのようにコックピットを4点(四隅)において上下移動できる装置、音だけで振動を与える装置もあります。
重低音で、振動する簡易振動装置(バイブレータ)
最も安価なのは、重低音の周波数で振動を発生させる装置です。ただし、音の周波数による制御であるため、振動の雰囲気を与えるのみとなります。主にエンジンから伝わる振動を再現するために利用する装置です。
下記事例の場合、6軸モーションに加えてシートの下に搭載しています。
 |
|
 |
| ■図1 UC-win/Road体験シミュレータ |
|
■図2 アイシン精機様DSシステム(一番右は、6軸モーション
+振動装置、フォーラムエイトUp&Coming105号掲載記事) |
2軸のモーション装置
2軸(ロール角とピッチ角)のモーション装置です。車両の傾きと前後・横加速を表現します。
 |
| ■図3 UC-win/Road DS 2軸モーションプラットフォームオプション |
4点1軸モーション装置
自動車の試験に使うロードシミュレータと同じ概念で、車両の振動を忠実に再現できます。また、車両の傾きも多少の再現できるため、加速感もある程度与えられます。
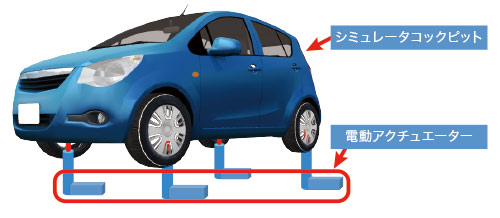 |
| ■図4 4x1軸振動装置のシステム概念図 |
大型シミュレータの例
大型シミュレータの事例として、一般的な6軸装置に、X併進装置、ヨーテーブル、振動台、バイブレータのすべてを組み合わせた実績もございます。
 |
 |
| ■図5 8自由度大型ドライビングシミュレータシステムの例 |
|
DS実験中の被験者映像をDSシステムで同期して記録することは可能でしょうか。
可能な場合、カメラ(特にインタフェース)に制約はあるでしょうか。 |
可能です。一般的にネットワークカメラを使用します。映像信号を受け取るPCを用意して、受け取り処理・記録を行います。映像フォーマットはNTSCなどが多いですが、IPカメラであれば容易にPCに取り込むことが可能で、HDに対応したカメラもございます。IPカメラでない場合、PC用ボードで受け取れる形式であれば、処理・記録が可能です。さらに、音声双方向通信機能を搭載しているものであれば、コックピットモジュールの運転者との会話が可能です。複数のカメラから映像を取得し、表示および同期させることもできます。
 |
| ■図6 画面分割表示・マルチカメラ対応 |
システム受託開発により下記のような拡張提案も行っております。
- 記録したVRシミュレーションの映像を同期して再生
- 汎用的なツールで映像を記録するPCとシミュレーションPCの時間を同期。映像フレームとシミュレーションログ間隔の同期機能により、フレームを同期して映像とシミュレーションデータを1対1で対応させ、さまざまな分析がより容易に可能となる。
|
DSシステムにおいて、リアルタイム性はどのような仕組みで制御および保証されているか、
技術的な解説をお願いします。 |
リアルタイム性は目的によって若干異なる意味を持ちますが、基本的にUC-win/Roadでは以下を考慮して確保するようにしています。
映像の滑らかさ、3D空間をリアルタイムで操作、閲覧できる
ソフトウェアの初版リリースから14年経過しているため、UC-win/Roadの初期ユーザ様ですと、ここで説明しているLOD機能が実装されていないバージョンをご利用されている場合は、表示のリアルタイム性に関して十分でないという指摘もございました。ユーザの皆様のご要望に基づき、弊社製品のコア部分のバージョンアップ、ハードウェア環境の向上等により、現状では大きく改善いたしております。具体的には、下記をご参照ください。
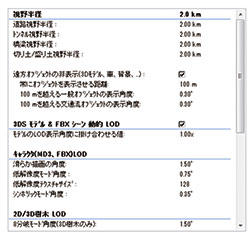
■ソフトウェア機能によるLOD(Level of Detail)機能
PCのスペックにより、3Dのデータベースが重たい場合、表示パフォーマンスを確保できなくなります。パフォーマンス確保のため、空間の各3Dオブジェクト表示レベルを自動制御する設定となります。これは、インターフェースによりユーザ様が自ら設定することも容易に可能です。たとえば、人間の3Dモデルなどは、カメラが近い場合は3Dで表示しますが、遠くに離れていくにつれマッチ棒のように簡素化されたシンボルで表示します。これにより、表示パフォーマンスを確保できます。
 |
| ■図6 画面分割表示・マルチカメラ対応 |
■3Dデータベースによるパフォーマンス確保
PCやグラフィックカードのスペックにより、3Dのデータベースが重い場合、表示パフォーマンスを確保できなくなります。この場合、道路データベースの作成時に、ポリゴンの少ないモデルを用いる等の配慮が必要です。弊社では、ドライビングシミュレータユーザ様向けのローポリゴンモデル(ポリゴンの少ない3Dモデル)をデータベースとしてご用意いたしております。(路面写真、樹木、建物など累計で7,000種類以上、保契約ユーザ様は、無償ダウンロード可能)。
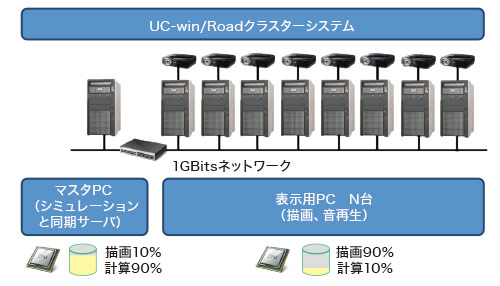
■クラスターシステムによる高性能マルチチャンネルシミュレータ
1台のPCから出力できる映像の数およびフレームレートには限界があるため、複数のディスプレイチャンネルを用いたシミュレータ向けにクラスターシステム機能をご用意しています。各ディスプレイにPCを割り振って処理を行うことで、パフォーマンスの低下を防止しています。
クラスターシステムの主な特長は次の通りです。
 |
| ■図6 画面分割表示・マルチカメラ対応 |
パフォーマンス:
- 表示PCで計算量が通常より低いため高フレームレートを確保可能
- 制御コンソールにて、マルチスレッディング処理のため操作と描画を同時に行ってもシミュレーション映像に影響がない
高度な環境同期:
- 交通車両
- 気象(雨、雪など)、3D樹木の枝の揺らぎ、旗の動きなど
- GenLock使用可能、3Dステレオに対応
シミュレーションが実時間に沿って計算されること
UC-win/RoadではPCのクロックを用いて、経過した実際の時間を基に交通およびドライビングシミュレーションを行います。また、シミュレーションステップを描画間隔に合わせ、描画と計算を同期させることで、高精度のシミュレーションと可視化を行います。
シミュレーション計算間隔が安定、ハードとの連携が可能
通常提供しているベースバージョンについては、Windows側で処理していますので、Windowsでの可能な限りのリアルタイム性が確保されたシステムとなっています。OS側のCPUとGPU資源の管理によって、計算と描画が必ず一定間隔で行われるわけではなく、平均間隔から±数ミリ秒変動することがあります。こういった場合はHILSを連携接続することで、一定間隔で行うシミュレーションをHILS側で行い、シナリオ制御、可視化などをUC-win/Road上で行います。2.で説明したように、一定間隔ではなくても実時間に沿って計算と描画を行いますのでHILSとの連携が問題なく行えます。
ドライバー操作からの応答時間(応答性)
ドライバーが操作してから、この操作に対応した自動車の挙動、映像、音などがドライバーに返されるまでの時間が、臨場感と没入感に大きく影響します。ドライビングシミュレータはさまざまな装置で構成され、信号処理の各段階を短縮するように研究開発を行っております。例として、PC間のデータ通信に共有メモリボード(リフレクティブメモリ等)のインテグレーション実績がございます。デバイス入力信号に対するシステム応答の遅れが出る原因は、映像でいえば主に下記のような内容となり、ソフトウェア側、ハードウェア側ともに対象となります。数ミリ秒から数十ミリ秒の世界の話ですが、各フローの遅れを短縮することで、リアルタイム性を確保するご提案を行っています。
- DS運転装置からPCやHILSへの信号伝送時間
- PC内での計算時間
- PCから表示装置(プロジェクター等)への映像伝送時間
- 表示装置(プロジェクター等)信号受信後の表示時間
最後にドライバーの目が映像を見るまでの遅れ時間は、上記の1-4までとなります。
|
|
| (Up&Coming '14 盛夏の号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|












