 |
Vol.3 2011.1. |
| |
3D図面サービス/3D模型サービス/3Dスキャン・VRモデリングサービス 最新情報
|
3D模型サービス / 3Dスキャン・モデリングサービス |
●3D模型サービス
フォーラムエイトでは、「3D・VRエンジニアリングサービス」として、「3Dスキャン・モデリングサービス」、「3D模型サービス」、「3D図面サービス」という、VRモデリングやBIMに関連した3Dエンジニアリングサービスを提供しています。
3D模型サービスは、UC-win/RoadやUC-win/FRAME(3D)をはじめとして、UC-1シリーズやAllplanなどで出力される各種3次元モデルを、3Dプリンタで実際の模型として作成するサービスです。フォーラムエイトでは、インクジェット法によるフルカラーの3次元モデル出力が可能で、造形範囲が横幅254mm×高さ381mm×奥行き203mmと業界最大クラスである、Zコーポレーション社製の最上位機種Zprinter650を使用しています(写真1)。
 |
| ▲写真1 Zprinter650 |
この度、大阪大学福田知弘准教授からの依頼により、豊前田・細江夢づくり会議のワークショップで使用するための街並み模型を作成させていただきました(写真2)。
豊前田・細江夢づくり会議とは、山口県の下関豊前田で行われている、地域文化の継承・地域文化の活性化を目的としたワークショップです。これからのまちの将来像といったイメージから、道路やアーケードを今後どのように整備していくべきかといった具体的なまちづくりについて、活発な議論が交わされています。
福田准教授は環境デザインの立場からこのワークショップに関わっており、国内外のまちづくりの事例を講演で紹介し、UC-win/Roadで作成したVRを検討に用いています。
VRは、商店街のまちなみのアイディアを話し合う際に、まちの現状を把握し、さらに将来のイメージを共有・検討するために活用されています。アーケードがかけられた既存の商店街、電線地中化やアーケード撤去を行った状態、さらに並木を配置しオープンカフェをイメージした将来像が瞬時に切り替えられるようなVRデータが作成されました。
| 現状 |
|
地中化 |
 |
|
 |
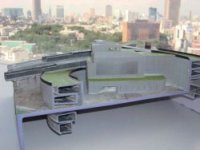
▲図1 豊前田・細江夢づくり会議ではVRデータで作成された豊前田細江地区の現況
提案イメージを活用して検討が行われている |
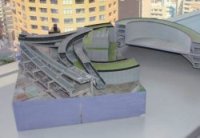
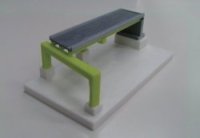
| ▼図2 3Dプリンタで出力された模型の一例 |
 |
 |
 |
| ▲桜田門周辺 |
▲東海環状 |
▲大師ジャンクション |
 |
 |
 |
| ▲大橋ジャンクション(1) |
▲大橋ジャンクション(2) |
▲取水ゲート |
上で紹介している画像は、それぞれ現況イメージと将来像の提案イメージになります(図1)。配置する並木の樹木にも複数の種類を用いるなどして、多様な検討が行われています。
福田准教授は「デザインやVRの専門でない方が遠慮なく自由にデザイン検討・VR操作することを考えると、まだまだやるべきことがある(ふくだぶろーぐより)」と考え、3Dプリンタによる模型の作成と、模型をVRと連携させたシステムで使用することを考案しました。
模型制作にはVRデータをそのまま利用しています。FORUM8 AZの小林佳弘氏によって開発されたプラグイン(Povray
to Max)を使用して、道路や交差点などのモデルをUC-win/RoadのVRデータから3dsMaxへの変換を行いました。さらに、模型出力のための専用ソフトMagicsを用いてポリゴンの状態を最適化し、Zprinter650で出力しています。
出力された模型は、VRで作成した豊前田細江地区の商店街の約600mの区間を縮尺1/500で作成したものです。全長は約1.2mになりますが、ひとりでも持ち運べる程度のサイズにすることを考え、模型を5分割しました。
分割したモデルは2回に分けて出力され、トータルで約24時間かけて模型が完成しました。通常の発泡スチロールや厚紙、木などを使用した模型作成にかかる時間と比較すると、フルカラーの模型作成としては大幅な時間短縮が可能となっています。
UC-win/Roadで作成した道路・交差点・周辺建物のモデルを再現したこの模型は、福田准教授が開発している都市プレゼンテーションシステムで利用される予定です。
都市プレゼンテーションシステムとは、UC-win/RoadのVRデータと模型を連携させたシステムです。レーザポインタで模型をポイントするとそれをセンサが読取り、VR空間でポイントされた場所に移動や視線方向の変更が行えるもので、模型、Webカメラ、レーザポインタ、VR空間を表示するためのディスプレイとUC-win/Roadによって構成されています。VR空間を見ながら、模型上の視線を向けたい、または移動したい位置をレーザポインタで指すと、その位置がWebカメラで取得され、ディスプレイのVR空間上に反映されます。実際に触れて直観的に理解できる模型と、交通の表現や気象の切替えといったシミュレーションを柔軟に行うことのできるVRの、それぞれの長所を組み合わせたシステムといえます。
なお、このシステムについては『土木建築エンジニアのプログラミング入門 -Delphiで学ぶVR,構造解析のSDK活用プログラミング-』(日経BP社刊)で詳しく解説されていますので、興味を持った方はぜひ参考にしてください。
●「3Dスキャンサービス」
フォーラムエイトでは、3Dレーザスキャナを用いて建物や道路などを3Dスキャンし、モデリングを行う「3Dスキャンサービス」を行っています。3Dレーザスキャナは毎秒5000点の速度での計測が可能で、地形や建物の計測、測量などにおいて高い実績のある製品です。
UC-win/Road Ver.5の点群モデリングプラグインを使用すれば、スキャンしたデータを点群モデルとして読込み、建物や橋梁など既存の施設の形状をVR上で正確に表現できます。xyz、csv、txt、ascなどの各フォーマットの読込みに対応しており、座標と色情報の読込みも可能となっています。ここでは、本サービスで受注した業務の一部を紹介します。
図2
自動車が進入できないためにMMS(左)で計測できない場所では、据え置き型の3Dレーザスキャナ(右)を利用。これらの点群データを併せてVRデータを作成している |
 |
企業が保有する建物の改修プランのために、全方向から建物の計測を行う業務では、計測した点群を用いてソフトウェア内で歪みを調整することでオルソ画像を作成しました。外壁の寸法を測って立面図を起こす代わりに、既存建物を計測したデータを用いて改修の計画に利用しています。
点群計測ではMMS(三菱モービル・マッピング・システム)がよく知られています。これは、GPSアンテナ、カメラ、レーザスキャナを一体化したユニットを搭載した車両で、道路を走行しながらスキャニングをする技術です。このシステムでは道路に沿った大量の点群を自動的に計測しますが、自動車が入れない場所の計測を行うことはできません。一方、フォーラムエイトで使用している3Dレーザスキャナは据え置き型なので、このMMSの弱点を補う形で、車両の入れない狭い場所や道路から離れた場所の計測を定点から行うことができます。
現在、ある企業の敷地全体と周辺道路および道路沿いの周辺環境を丸ごとMMSで計測するプロジェクトに関わっています。MMSを補完する形でレーザスキャナでの計測を行い、MMSとレーザスキャナ双方からの点群をUC-win/Road
Ver.5に読込んだうえで、さらに点群を参照してVRデータを作成しています。
また、東京農業大学の山崎元也教授、北見工業大学の川村彰教授と共に行っている点群計測の共同研究では、渋谷交差点と日本橋中央通りの計測を行っており、このうち渋谷交差点の点群データはUC-win/Road
Ver.5でサンプルとして収録しています。
フォーラムエイトでは、ここで紹介した3D模型サービス、3Dスキャンサービスに加えて、BIM対応3D図面作成オプション/報告書・図面トータルサービスと併せた「3D・VRエンジニアリングサービス」を展開しています。ぜひご利用ください。
 |
▲図3 点群計測による渋谷交差点データ
UC-win/Road Ver.5でサンプルとして収録されている |
|
|
| (Up&Coming '11 新年号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|



