| New Products |
|
|
●最新版製品価格 |
●リリース 2012年5月21日
UC-1 CALS/CAD |
|
|
|
| 今回の改訂では、走行方法および対応車種の拡張、3DVRシミュレーションとの連携強化を中心に機能を追加・改善しました。 |
従来は、図1のような走行ルートの一部分のみの切り返しの場合でも、「切り返し走行」により直進部を含む全ルートを個別に設定する必要があったため、入力に手間がかかっていました。そこで、今回の改訂ではライン走行と切り返し走行を組み合せた「組み合せ走行」に対応しました。これにより、切り返し走行のみで設定した場合よりも入力の手間が大幅に軽減されます。
■図1 組み合せ走行(赤丸が切り返し位置)
|
新たな車両として連節バスに対応しました。連節バスは図2のように、先頭車両の後ろに関節で複数台のバスが連結された構造となっており、各車両間には幌があって通り抜けができるようになっています。本プログラムでは、フルトレーラに類似した挙動をすると仮定して軌跡計算を行なっています。
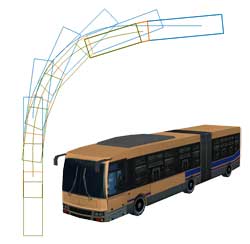
■図2 連節バスの軌跡例
|
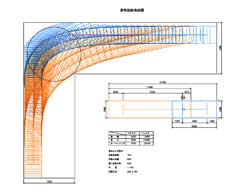
各車両に走行速度と旋回半径の関係を入力することで、入力した速度に対応する旋回半径(または旋回半径に対応する速度)をセットできる機能を追加しました。
■図3 走行軌跡と旋回半径の関係
|
ライン走行において、ライン(ルート)調整機能を追加しました。たとえば、最初に設定したライン(ルート)では走行コースに接触するなどして、走行軌跡を確認しながらラインを調整できます。図4のように、移動した場合の軌跡を確認しながら調整できるので、ライン走行の設定がより簡単になりました。
■図4 ライン(ルート)調整機能
|
Ver.1のOpenMicroSimファイル出力機能は、車両諸元形状に則した矩形モデルが出力され、異なるモデルを設定するにはUC-win/Road
での設定が必要でしたが、プログラム側で設定できるように対応しました。
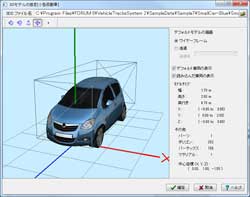
■図5 3DVRシミュレーション(UC-win/Road)
|
OpenMicroSimファイルにおける停止時間の設定に対応しました。停止時間は図6のように、「走行開始位置」、「旋回開始・終了位置(切返走行の場合は切返位置)」、「走行終了位置」に設定できます。また、OpenMicroSimファイル保存時には、計算した軌跡の1ステップごとに停止時間を設定できます。
■図6 停止位置
|
図面への車軸の作図に対応しました(図7)。作図するかしないかを選択でき、より細かな図面設定が可能となりました。
■図7 図面の作図(車軸あり)
|
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|



