|
|
|
このたびドライビングシミュレーション用のモーションプラットフォームオプションを2009年4月末にリリースいたします。本オプションは、仮想的な運転の再現、特にモーションプラットフォームについて基本的な情報を紹介します。
●モーションプラットフォームの必要性
仮想現実(VR)により運転シミュレーションを行う時、運転者の感覚を現実に近く再現すればするほどシミュレーションの結果がより正確に得られることは言うまでもありません。人間の感覚には5種類(視覚、聴覚、味覚、嗅覚、触覚)あり、それに平衡感覚を加えれば全てを簡単に再現できるものではありません。
運転の場合は最も重要な感覚は視覚で、3次元VRアプリケーションで再現します。聴覚はサウンドシステムで再現します。運転者が運転中味覚と嗅覚を利用しないとしても、車両の動きを捉えるためには平衡感覚を必要とします。
現在、大変複雑で微細な所までシミュレーションをして運転者に伝達するために確立された最先端の技術としてモーションプラットフォームがあります。逆に、車両の動きが大きく変動しない単純な訓練だけを目的とするシステムの場合にはモーションプラットフォームはさほど重要なものではありません。
●モーション再現の基本
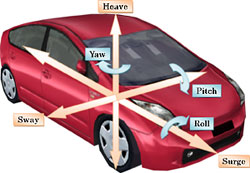
通常運転者が感知する動きを再現するには人間の感覚を騙す必要があります。平衡感覚はいくつかの情報源から統合されます。内耳の三半規管(前半規管、後半規管、外側半規管)という半規管で3次元回転加速度を感知し、耳石器官(卵形嚢と球形嚢)で水平と垂直の直線加速度を感知します。
正に3次元の動きを捉えるので、モーションプラットフォームで3次元の動きを再現しなければなりません。回転と直線移動を伴うこれらの動きに完全に対応するには、2×3軸=6自由度(6
DOF)が必要になります。しかし、モーションプラットフォームは実際の車両より限られた範囲で動作するので、実際の車両運動をそのまま再現させることは不可能です。移動量や速度で動きを把握するのではなく主に加速度で感知します。そのためモーションプラットフォームは加速度を再現するために作られ、制御されています。
モーション再現方法としては下記の基本的な技術を利用します。
一般的な6DOFハードウエア構成はコックピットの下に複数のアクチュエーターを組み合わせた形になります。この構成でコックピットがある中心点から全方向に移動し回転します。中心からの最大移動距離がモーションの限界になり、時間が長い連続的な移動はできません。
 |
|
 |
| ▲用語ガイド |
|
▲6DOFプラットフォーム |
この制限に対し、3つの対策が一般的に採用されています。
- 車両における高周波の加速度を優先に再現します。
- 次の加速度を再現するために運転者に気付かれない速度でコックピットを中央に戻します(Washout)。
- コックピットを傾けると自然な重力で時間の長い水平加速度を再現します。この方法により3DOF(Yaw、Pitch、Heave)のモーションプラットフォームでもSurgeとSwayをある程度再現できます。
大型のシミュレーターでは、X,Yのテーブルを用いて水平のレール上に6DOF構成のハードウエアを動かすことで水平の長い加速度が改善されます。さらに、Yawテーブルでコックピットを水平に回転させることで車両曲がり具合の感覚が再現されます。
●UC-win/Roadでのサポート
UC-win/Roadのドライビングシミュレーション機能のオプションとしてINNOSIMULATION,
IncのOEM形態によるモーションプラットフォームハードウェアに連携させました。連携開発に際しては、ソフトウェアを改良する必要がありました。高性能のモーションを再現するために開発元であるINNOSIMULATION,
Incの車両運動モデル、およびプラットフォームの動作を制御するWashoutフィルタを採用しました。Mechanical
Simulation Corporation開発のCarSimによる車両運動モデルを使用することも可能です。
プラットフォームの不連続な動きを防ぐためにはプラットフォームの位置を100Hz以上のレートで制御を行うようにしました。自車の運動計算と共にプラットフォームの制御を行い、連続性を確保した動きの再現ができます。
また、ハードウエアの安全そしてユーザの安全を守るために4層の安全システムを構築しています。
- UC-win/Roadから出力するプラットフォームの移動命令信号に移動可能な範囲および安全な加速度を超えないようにフィルタを掛けています。
- ハードウエア装置側で同様な目的のために移動命令信号に問題がないかを確認します。
- アクチュエーター自体に送信する命令信号の確認を行い、異常な場合はアクチュエーターの動きを強制的に止めることができます。
- ユーザの判断で停止できるように緊急停止ボタンを用意しています。
 |
|
 |
| Size |
2400×1200×615 |
| Weight |
1000kg |
| Operating temperature |
0〜35℃ |
| Payload |
800kg |
|
| DOF |
Displacement |
Velocity |
Acceleration |
| Roll |
±8° |
>±60°/s |
>±300°/s |
| Pitch |
±5° |
>±60°/s |
>±300°/s |
| Heave |
±50mm |
>±200mm/sec |
>0.5g |
|
|
Open Micro Simulation Webサイト公開:
Micro Simulation Playerを4月にリリースいたしました。他の外部シミュレーションソフトウェアからOpenMicroSim形式で出力したシミュレーションの結果を可視化できるオプション機能です。交通解析、避難解析、4D施工マネジメントアプリケーションなど、いわゆる物の動きのシミュレーション結果をUC-win/RoadのVR環境で再生できます。OpenMicroSimは弊社で開発し提案するオープンフォーマットです。正式な情報は下記のウェブサイトからアクセスできます。
http://www.openmicrosim.org |
■UC-win/Road モーションプラットフォームオプション リリース予定日:2009年4月 |
(Up&Coming '09 新緑の号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|