| New Products |
|
|
●最新版製品価格 |
●リリース 2013年12月
UC-winシリーズ シミュレーション |
|
|
| バーチャルリアリティによる道路設計セミナー |
CPD |
●開催日 :2013年11月26日(火)9:30〜16:30
●本会場 : 東京本社 品川インターシティA棟セミナールーム
※TV会議システムにて東京・大阪・名古屋・福岡・仙台・札幌・金沢 にて同時開催
●参加費:1名様 \18,000 |
|
UC-win/Road Ver.9.1では既存機能の強化をしつつ、新機能の開発も行いました。シミュレーション機能では、ソフトウェアエッジブレンディングによるマルチプロジェクターを用いたドライビングシミュレータと展示システムに対応し、交通シミュレーションの向上を行いました。
モデリング機能に関して、OHPASS製品の出荷開始と伴ってUC-win/RoadでOHPASSデータインポートプラグインをリリースいたしました。点群モデリングプラグインでは点情報と写真合成による点群の着色処理が可能になりました。 |
プロジェクターを用いて映像を表示するとき、投影面のサイズによっては、複数のプロジェクターで一つの映像を投影するマルチプロジェクションが必要になります。このとき、図1のように、隣り合うプロジェクターの映像が重なる領域において、輝度が高くなりすぎる問題が発生します。
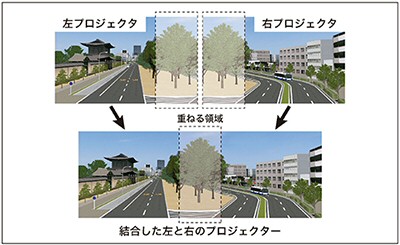 |
| ▲図1 マルチプロジェクターのオーバーラップ領域の問題 |
この現象に対処するため、従来は高価なプロジェクターを用いる、ある専用グラフィックカードを利用する(ただしビデオ出力数の制限等がある)により、輝度を徐々に落として均一な輝度分布にするエッジブレンディングが行われてきましたが、UC-win/Road Ver.9.1では、特別なハードウェアを用いなくても、ソフトウェアによりこの処理を行うソフトエッジブレンディングを行うことができるよう開発を行いました。
具体的には、出力画像にデジタル的なフィルターを追加し、オーバーラップ領域(重なる領域)の輝度を徐々に落とすグラデーション処理を行います(図2参照)。これにより、プロジェクターの映像を重ね合わせても、オーバーラップ領域を均一な輝度で表示可能になります。
また、プロジェクターは2台だけではなくて、図3の6台構成のような様々な合成に対応可能です。
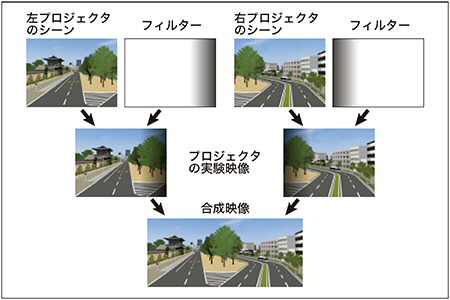 |
| ▲図2 デジタルフィルタリング |
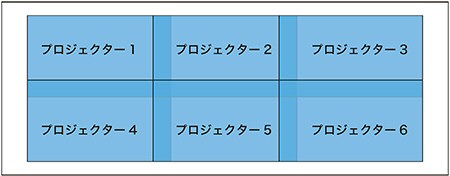 |
| ▲図3 プロジェクター6台構成の例 |
|
近年、増え続けているドライブアシスト機能を持った自動車のシミュレーションを行えるように、先行車両、信号機、制限速度の自動認識による自動運転また運転支援機能を開発しました。シナリオでのアシスト機能の詳細設定、走行時の手動切り替え及びアシスト状態の表示が行えます。
アシスト機能:速度自動制御、ステアリング自動制御、ブレーキアシスト機能、重畳表示機能
さらに、シナリオ機能で他車と歩行者の動作を実行中に変更することにより、高度なシチュエーションを表現することが可能になります。主に、以下の動作を運転状況(運転操作や先行車両との車間距離など)によって制御することが可能になります。
- 他車の車線変更、車線中心からの平均的な離れの変化および速度変更
- 歩行者のアニメーションの種類および移動速度の変更
 |
| ▲図4 先行車両認識と情報表示機能 |
|
近年、建築や土木測量により採取された3次元点群データの利活用が進んでおり、UC-win/Roadにおいても、点群データの可視化、道路線形生成の補助ツールとしての「点群モデリングプラグイン」を提供しています。ただし、点群データの中には、計測時の気象条件(天候、明るさ)が適切でないため点群の色情報の精度が低い場合、あるいは計測機器の仕様のため元々色情報が存在しないデータもあります。Ver.9.1では、点群モデリングプラグインを拡張し、これらの点群に対して、別途用意した写真から色情報を抽出する点群着色機能を追加いたしました。
本機能を用いるには、以下の情報が必要になります。
- 着色する点群データ
- 着色に用いる複数の写真画像
- 撮影画像の座標およびカメラの向き
- 撮影に用いたカメラの画角等の情報
- 着色する範囲や色の補正の割合等の各種パラメータ
これらの情報を用いて、次のように着色処理を行います。
- カメラの視野領域の定義:カメラ位置ごとに、カメラの撮影方向及び画角(視野角)を示す錐体を定義する(図5参照)
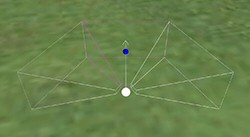 |
| ▲図5 カメラの視野領域 |
- 色情報の抽出に用いる写真画像の選別:視野領域内の複数の画像から、適用可能な画像を選別します。
- 抽出した色情報の補正と合成:点群の点ごとにどの画像のどのピクセルが一致するかを解析し、カメラ位置からの距離による補正等を行い最適な色情報を定義します。
|
OHPASSとは、遺伝的アルゴリズムを用いた線形評価を行うことにより、線形形状や事業コスト、土量バランス等の最も優れた経済的な線形を導き出すことが可能なプログラムです(2013年9月に初版リリース)。OHPASSプラグインは、OHPASSの解析結果をインポートするためのプラグインで、OHPASS固有のファイル形式を解析し、以下の情報をUC-win/Roadに連携することができます。
- 平面、縦断線形 ・道路横断面
- 道路周辺の地形 ・土工、橋梁、トンネルの区間情報
- 車線数などの道路パラメータ
本プラグインの特徴は、複雑な操作を行わなくとも、OHPASSの解析結果を選択するだけで、OHPASSによって最適化された道路線形をUC-win/Roadに取り込むことが可能なことです。近年、CIMの導入によりフロントローディング(より上流工程で広範囲な最適化を行うことにより手戻りを減らしコストを削減する)のメリットが注目されていますが、設計初期段階の様々な条件による多数の道路線形を、短時間でVR表現し、景観検討や運転シミュレーションによる走行性等の多角的な検討を行うことにより、設計期間の短縮、コスト削減など様々なメリットが得られます。以下に、本プラグインの利活用方法を示します。
- 設計発注者や関係者との打ち合わせ、プレゼンテーション
- 地元住民や利害関係者との合意形成、環境アセスメントに優れたPI手法の構築
- 道路計画段階での景観評価および道路構造評価、これらの最適設計へのフィードバック
- ドライビングシミュレーションによる走行性・視認性評価
 |
|
 |
| ▲図6 OHPASS解析結果選択画面 |
|
▲図7 運転シミュレーションによる走行性評価 |
|
| (Up&Coming '13 晩秋の号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|






