|
UAV最新活用事例 |
HARDWARE INFORMATION
2015-No.1 |
|
|
|
|
|
|
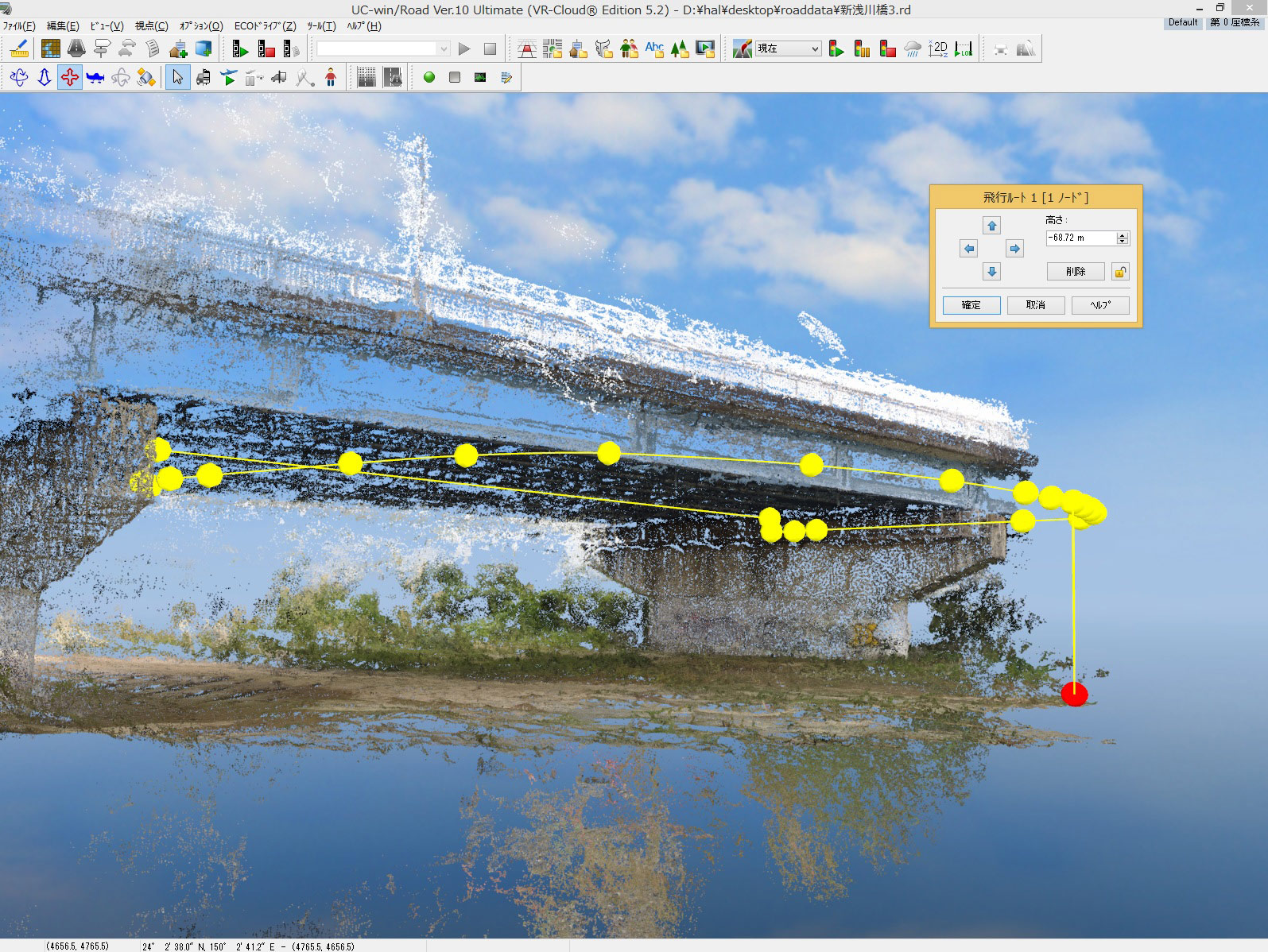
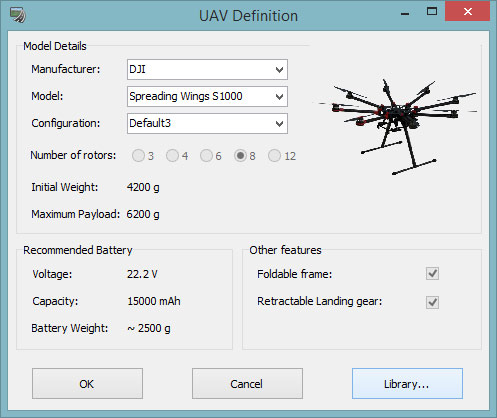
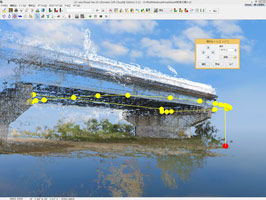
フォーラムエイトでは、UAV(無人機)を3D・VRソフト「UC-win/Road」による、飛行計画・経路設定、リアルタイムモニタリング、収集データの可視化と組み合わせたトータルソリューションの提供に取り組んでいます(図1左)。現在、既存UAV プラットフォーム のライブラリに基づいて、使用するドローンの選択・定義が可能な飛行計画・経路設定の機能を開発中です。(図1右)
|
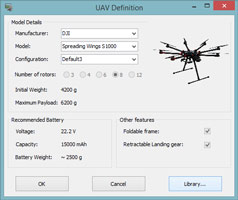 |
| ■図1 UC-win/RoadでUAVマネジメント(左)、UAVの定義 (右) |
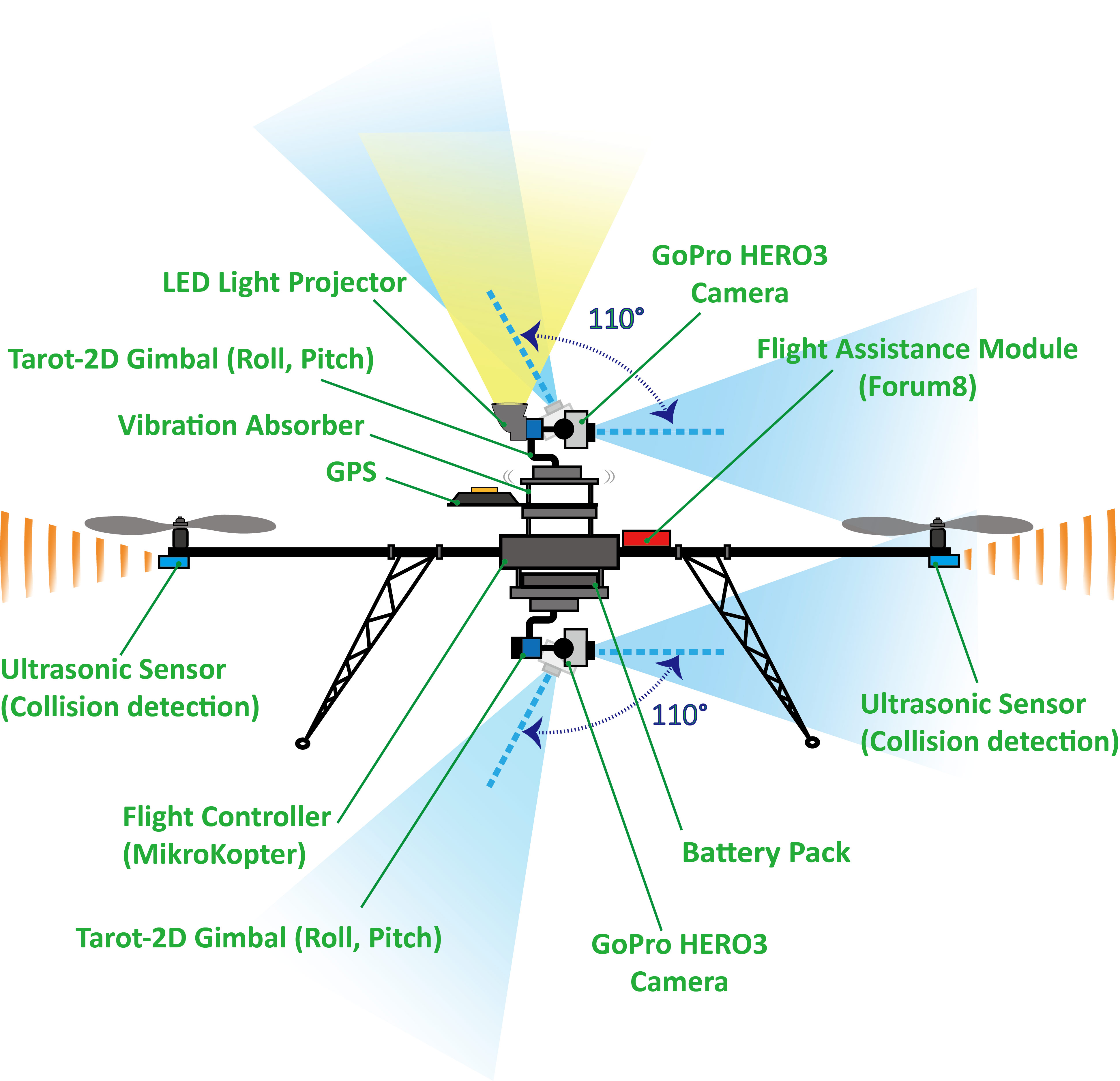
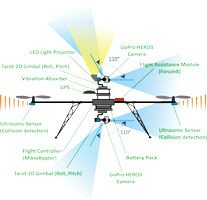
このプロジェクトは橋にある潜在的なダメージや老朽化による影響(ひび、さび、ボルトの緩みなど)の調査を行うことに適用できます。人の目の届かない場所、立ち入れない場所の調査を行うのに、UAVは有効です。既存UAVプラットフォーム(MikroKopter
Okto-XL)を用いて開発を行い、カメラと距離センサーを追加して橋梁調査用にカスタマイズを行いました。(図2)
|

|
| ■図2 カスタマイズ版UAV。概要 (左) と UAV (右) |
UAV使用の上で問題となるうるものの一つが、安全にドローンを遠隔操作する能力です。そのため操作補助として、距離センサー(超音波, 赤外線, 2Dレーザーレンジファインダ)を実装中で、 周囲の障害物との距離を推測、衝突を回避することが可能になります。
先日、東京都八王子市新浅川橋で行われた橋梁現場検証会にて、20名ほどの審査委員会の前でデモンストレーションを行いました(図3)。このイベントの様子はNHKとTBSにて報道されました。

|

|
| ■図3 橋梁現場検証 |
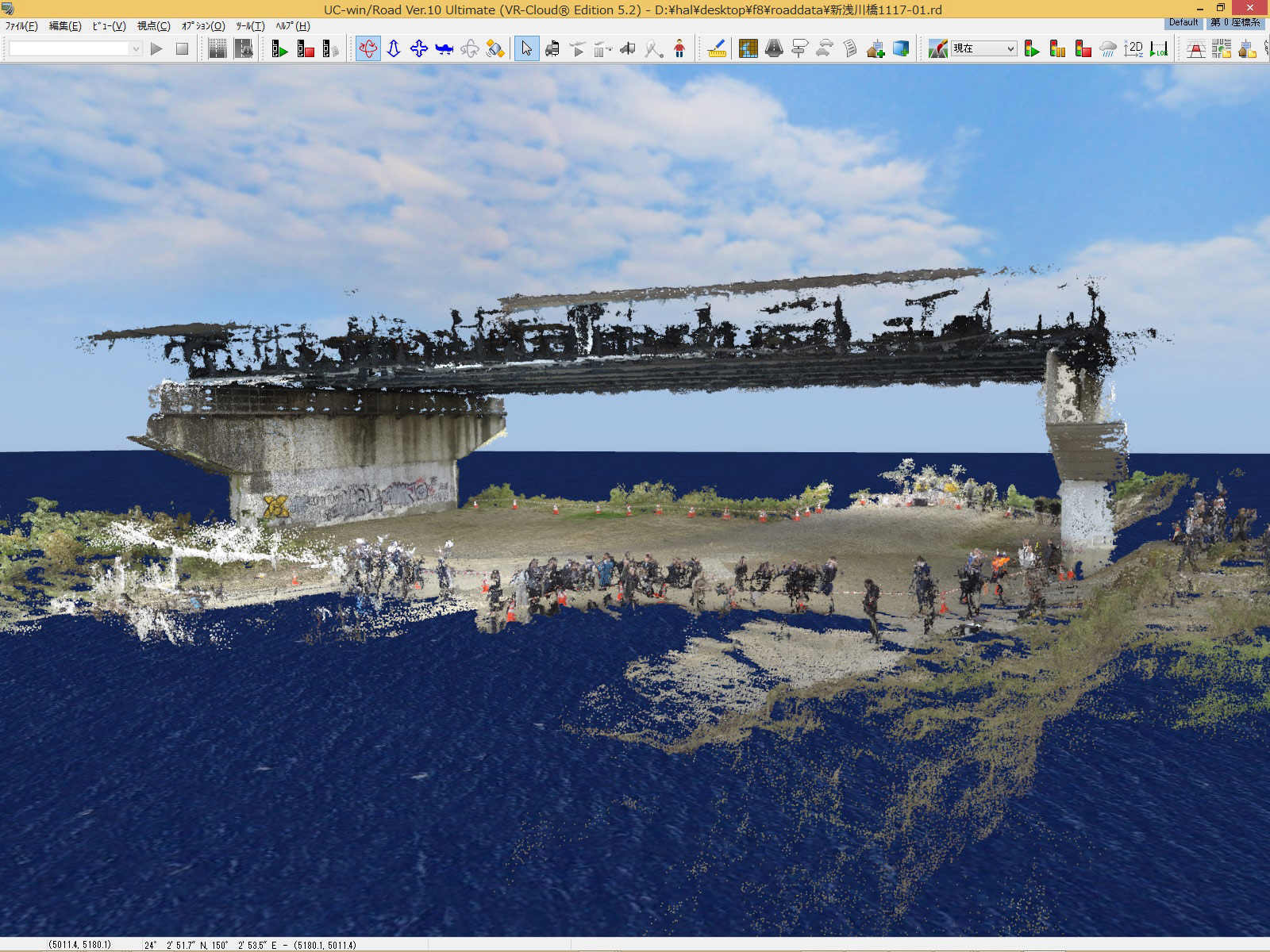
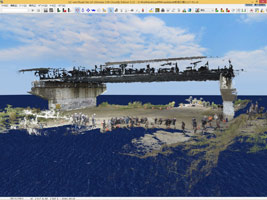
両方のカメラで撮影された写真は合成されその環境の3D地図を生成し、UC-win/Road上で見ることが可能です。 (図4)
現在はデータ作成はオフラインで実行されますが、次回の開発では同時位置推定と環境地図作成(SLAM)と同様の方法に基づいて、リアルタイム飛行環境の3D復元を行います。

|
|
| ■図4 UC-win/Road上バーチャルデータ |
|
|
| ※ 社名・製品名は一般的に各社の登録商標または商標です。 |
|
| (Up&Coming '15 新年の号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|