これまでのフォーラムエイトの主な活動分野は、3Dシミュレーションに基づいた土木工学やバーチャルリアリティといった方向性でしたが、今年度はロボット工学という新分野に活動の幅を広げました。
この分野の最初のプロジェクトとして、ロボット工学を専門とするゼットエムピー社によって開発された、ロボットプラットフォームによるRoboCar®のシミュレーションに取り組みました。RoboCarとは車の縮小モデルで、デバイスとソフトウェアアルゴリズムの進化により自律的な動作が可能となっています。この他にもフォーラムエイトでは、独自のモバイルロボットの開発に着手しています。
|
UC-win/Road for RoboCar®開発の目的は、ロボット工学から着想を得たツールにより、自動車メーカーに対して新たな運転補助装置を開発し、より安全で快適な運転を追求することです。RoboCar®の最新バージョン(図1)の機能は、以下のようになっています。
- 各車両と主モータの相対値エンコーダによるRoboCar®の位置と方向の測定機能
- レーザー測距器、赤外線センサ、ステレオカメラによる最接近障害物との距離計測、自律ナビゲーションの既知パターン識別
- ワイヤレスLANアダプタによるRoboCar®へのリモートアクセス
- 加速度計、Gyro
- 温度センサ
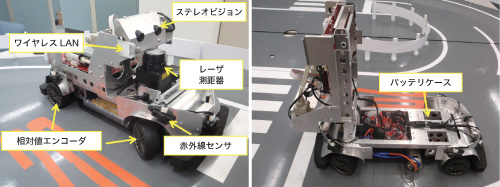
■図1 RoboCar®最新バージョン
これらのシステムの全体は、Linuxの500Mhz CPU動作をベースとしたメインボードで管理されています。また、2.7m × 1.8mのコースを構築し、横断歩行者、ガードレール、交通信号機など、実際の車両走行をシミュレーションしました。フォーラムエイトが開発したUC-win/Road ドライブシミュレータを用いて、3D・VR環境における自動車モデルのシミュレーションを行いました(図2)。

■図2 UC-win/Road for RoboCar®の表示画面(上面ビューとユーザービュー)
マニュアルモードで走行する際、ユーザは、たとえばハンドルやペダル(アクセルやブレーキ)など、実際のRoboCar®とシミュレーションモデルを標準入力装置により操作します。UC-win/Roadユーザ制御をRoboCar®に送り、RoboCar®はセンサからデータをリアルタイムに返します(図3)。
■図3 RoboCar®とUC-win/Road間のコミュニケーション
|
RoboCar®のシミュレーションを適切に行うために、UC-win/Roadはサンプリング時間でRoboCar®の位置情報(位置と方向)を把握する必要があります。最近まで、この2D位置情報は走行距離計測法の原理により測定されていました。最近は、過去のサンプリング時間の位置情報や、各車両に搭載された相対値エンコーダを用いた車輪回転の計測に基づいて計測されています(図5)。
この手法は非常に単純でわかりやすいという利点がありますが、車輪が床をスリップする、またその他の蓄積誤差(統合手法による各車輪の実際の半径変動性など)など、性質の異なるエラーの影響を受けてしまうという側面もあります。
実際のRoboCar®とシミュレーションモデルが同じ位置情報から開始したとしても、こういったエラーの影響により走行距離が長くなるにつれてモデルの計測位置情報に誤差が生じてきます。この問題を解決するには、過去の位置情報とは別にRoboCar®の位置情報を定期的に提供する絶対的な位置決定システムを導入することです。ざまざまなソリューションを調査し、もっとも容易に実行可能な、拡張現実から着想を得たツールを用いています。
 |
 |
■図4 RoboCar®車輪の
(光)回転エンコーダ |
■図5 走行距離計測法の原理を用いた現在の位置情報(X, Y, Θ)の計測 |
|
拡張現実(AR)は複合現実(mixed reality)の一種で、現実世界と仮想世界の間にあるものを指します(図6)。
■図6 拡張現実(Augmented Reality) vs. 仮想現実(Virtual Reality)
一般的に、ARシーンとはライブビデオ画像に挿入されたCGを表します。ARツールの一部はマーカーに依存して、トラックする項目の3D位置情報を決定します。
開発中の拡張現実位置決定システム(AUgmented REality LOcalization System)により、同時に複数のマーカーをトラックすることができます(図7)。各マーカーは同じ境界(黒い四角形)を示し、黒い四角形内のパターンに基づいてマーカーの識別が行われます。
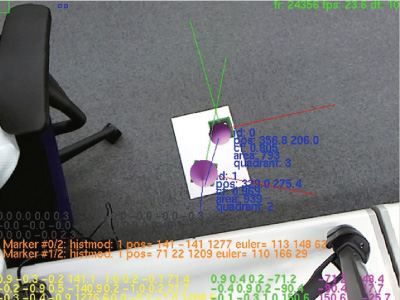
■図7 AURELOを用いた2つのマーカーの3D位置特定
マーカーとカメラの位置が離れると計測エラーが増えます。距離が1.5mより短い場合、計測エラーは位置7mm未満、角度2度未満の誤差となります。
使用したARツールでは、カメラ参照フレームと相対的な各マーカーの変換マトリックスのみを識別することができます。その結果、RoboCar®コースの上部にあるカメラを用いて、2つのマーカーで現実のRoboCar®絶対位置情報を追跡することが可能になりました。図8は実際の上面ビューを示しています。
最新バージョンのAURELOシステムでは、2.7m x 1.8mより広いコースでRoboCar®の追跡が可能です。このような結果から、次のバージョンでは、マルチカメラシステムを用いて追跡パフォーマンスをさらに広い範囲で実行可能になるのでは、という期待が高まっています。
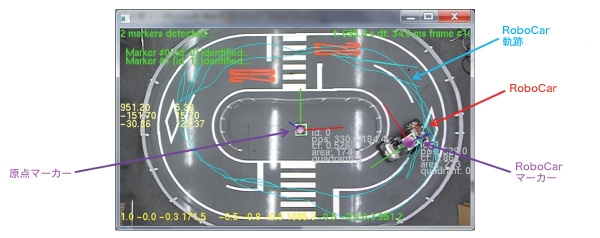
■図8 AURELO上面ビュー
|
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|



