| UC-win/Road for RoboCar(R) Ver.2 AURELO (오레로) 대응판 |
|
| 확장 현실 위치 결정 시스템에 의한 3D위치 특정 기능 대응 |
| 릴리스 예정 ● 2011년 1월 | 시뮬레이션 |
| New Products | |||||||
|
|||||||
| 로봇공학 분야로의 대처 |
| 지금까지의 포럼에이트의 주요 활동 분야는 3D시뮬레이션에 토대를 둔 토목공학이나 버추얼 리얼리티라고 하는 방향성이었지만, 금년도는
로봇공학이하고 하는 신분야에 활동의 폭을 넓혔습니다. 이 분야의 최초의 프로젝트로써 로봇공학을 전문으로 하는 제트엠피사에 의해 개발된 로봇 플랫폼에 의한 RoboCar(R)의 시뮬레이션에 임했습니다. RoboCar란 차의 축소 모델로 디바이스와 소프트웨어 알고리즘의 진화에 의해 자율적인 동작이 가능하게 되어 있습니다. 이 외에도 포럼에이트에서는 독자적인 모바일 로봇의 개발에도 착수하고 있습니다. |
| 최신 버전의 기능 |
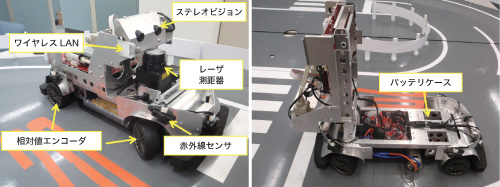
UC-win/Road for RoboCar(R)개발의 목적은, 로봇공학에서 착상을 얻은 툴에 의해, 자동차 메이커에 대해서 새로운
운전 보조 장치를 개발하고, 보다 안전하고 쾌적한 운전을 추구하는 것입니다. RoboCar(R)의 최신 버전(그림1)의 기능은
아래와 같습니다.
이러한 시스템의 전체는, Linux의 500Mhz CPU동작을 베이스로 한 메인보드에서 관리되고 있습니다. 또한 2.7m × 1.8m의 코스를 구축하여 횡단보행자, 가드레일, 교통신호기 등, 실제의 차량 주행을 시뮬레이션 했습니다. 포럼에이트가 개발한 UC-win/Road 드라이브 시뮬레이터를 이용해 3D・VR환경에 있어서 자동차 모델의 시뮬레이션을 실시했습니다(그림2).
매뉴얼 모드에서 주행할 때, 유저는 예를 들면 핸들이나 페달(엑셀이나 브레이크)등, 실제의 RoboCar(R)와 시뮬레이션 모델을 표준 입력 장치에 의해 조작합니다. UC-win/Road유저 제어를 RoboCar(R)로 보내, RoboCar(R)는 센서로부터 데이터를 리얼타임으로 돌려줍니다(그림3).
|
| 2D위치 특정: 주행거리 계측법 |
| RoboCar(R)의 시뮬레이션을 적절하게 실시하기 위해서 UC-win/Road는 샘플링 시간에서 RoboCar(R)의 위치 정보(위치와
방향)를 파악할 필요가 있습니다. 최근까지 이 2D위치 정보는 주행거리 계측법의 원리에 의해 측정되었습니다. 최근은, 과거의 샘플링
시간의 위치 정보나 각 차량에 탑재된 상대값 엔코더를 이용한 차륜 회전의 계측에 기초를 두고 계측되고 있습니다(그림5). 이 수법은 매우 단순하고 알기 쉽다는 이점이 있지만, 차륜이 바닥을 슬립하는, 또는 그 외의 축적오차(통합수법에 의한 각 차륜의 실제의 반경 변동성 등), 성질이 다른 에러의 영향을 받게 된다는 측면도 있습니다. 실제의 RoboCar(R)와 시뮬레이션 모델이 같은 위치 정보에서 개시했다고 하여도 이러한 에러의 영향에 의해 주행거리가 길어짐에 따라서 모델의 계측 위치 정보에 오차가 생깁니다. 이 문제를 해결하기 위해서는 과거의 위치 정보와는 별도로 RoboCar(R)의 위치 정보를 정기적으로 제공하는 절대적인 위치 결정 시스템을 도입하는 것입니다. 다양한 솔루션을 조사하여 가장 간편하게 실행 가능한 확장 현실로부터 착상을 얻은 툴을 이용하고 있습니다.
|
| 확장 현실 위치 결정 시스템(AURELO) |
확장 현실(AR)은 복합 현실(mixed reality)의 한 종류로 현실세계와 가상세계의 사이에 있는 것을 가리킵니다(그림6).
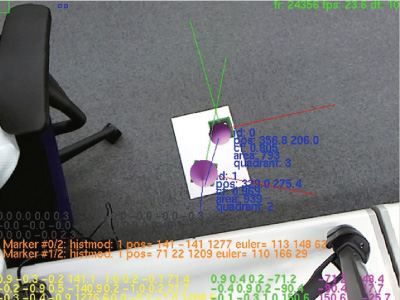
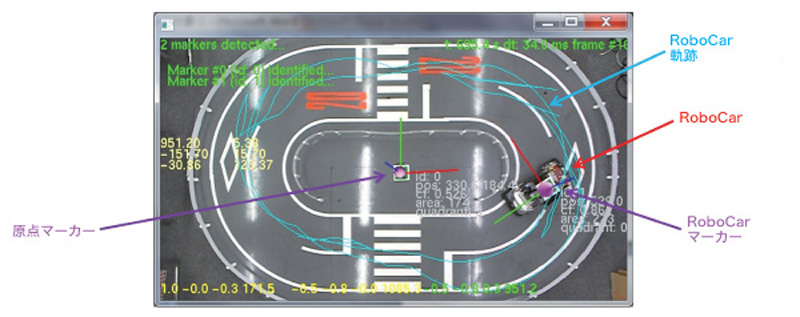
일반적으로 AR씬이란 라이브 비디오 화상에 삽입된 CG를 나타냅니다. AR툴의 일부는 마커에 의존하여 트랙할 항목의 3D위치 정보를 결정합니다. 개발중인 확장 현실 위치 결정 시스템(AUgmented REality LOcalization System)에 의해, 동시에 복수의 마커를 트랙하는 것이 가능합니다(그림7). 각 마커는 같은 경계(검정색 사각형)를 나타내고 검정색 사각형내의 패턴에 기초를 두고 마커의 식별이 실시됩니다.
마커와 카메라의 위치가 떨어지면 계측 에러가 늘어납니다. 거리가 1.5m보다 짧은 경우, 계측 에러는 위치 7mm미만, 각도 2도 미만의 오차가 됩니다. 사용한 AR툴에서는 카메라 참조 프레임과 상대적인 각 마커의 변환 매트릭스만을 식별할 수 있습니다. 그 결과, RoboCar(R) 코스의 상부에 있는 카메라를 이용해 2개의 마커로 현실의 RoboCar(R)절대 위치 정보를 추적하는 것이 가능해졌습니다. 그림8은 실제의 윗면뷰를 나타내고 있습니다. 최신 버전의 AURELO시스템에서는 2.7m x 1.8m보다 넓은 코스에서 RoboCar(R)의 추적이 가능합니다. 이와 같은 결과로부터 다음 버전에서는 멀티 카메라 시스템을 이용하여 추적 퍼포먼스를 한층 더 넓은 범위로 실행 가능해질 것이라는 기대가 높아지고 있습니다.
|
| (Up&Coming '11 신년호 게재) | ||
 |

|

| �ŋ߃����[�X�������i | ||||||||||
|
| �L�����y�[�����{�� | ||||
|
| �Z�~�i�[�E�C�x���g�J�����_�[ | ||||||||
�J�Êԋ߂̃Z�~�i�[
|