|
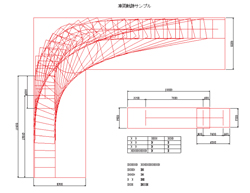 |
| ■图1 车辆轨迹作图系统-设置车辆登录 | ■图2 车辆轨迹图纸确认 |
 |
 |
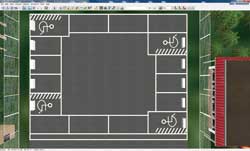
| ■图3 停车场作图系统-停车位置的批量配置 | ■图4 停车场、车辆轨迹CAD连接结果 |
| New Products | |||||||
|
|||||||
| 自动停车支援系统是指 |
| 近年,在轿车高功能化的进步中,搭载自动停车支援系统的车辆逐渐增加。 该系统是基于照相机图像和超音波传感器的信息停车时的方向盘操作由车辆自动进行。 驾驶员需要注意周围的状况,但基本上只需要按照语音提示进行油门、刹车和变速杆的操作,即可简单完成入库、纵列停车。此外,通过使用高精度超音波传感器,可进行障碍物的自动检出和停止。 目前,自动停车支援系统已用于丰田的普锐斯、Lexus系列,VW的Park Assist,BMW的AutoParking System、Honda的智能停车助手等众多机动车品牌。 |
| 车辆轨迹、与停车场CAD的连接 |
FORUM 8对车辆轨迹、停车场设计、自动停车系统的综合解决方案进行提案。本公司UC-1系列的车辆轨迹制图系统中,基于「半挂车及全挂车的直角旋回轨迹图的样式(JASO Z006-92),社团法人机动车技术会」等制图理论,计算车辆的行驶轨迹并制图,对于想定的路线、既存的路线可有效进行行驶模拟、车辆轨迹的制图(图1、2)。作成的图面通过与UC-1系列的停车场制图系统连接,可讨论停车位置的出入问题,并支援停车场设计(图3、4)。该停车场图纸导入UC-win/Road在VR空间上生成停车场,输出图面还可用于RoboCar(R)进行模拟行驶的用地。
|
| 通过RoboCar(R)进行模拟 |
| FORUM8作为机器人工学领域的模拟采用了RoboCar(R)。RoboCar(R)是实车缩小比例的模型,通过使用搭载的外部设备、软件,可进行自律行驶等复杂控制。RoboCar(R)是基于Linux的主端口进行管理,外部通过无线LAN可进行操作。UC-win/Road
for RoboCar(R)是三维实时VR和RoboCar(R)的连接系统。通过运用此系统一边在3DVR环境下进行模拟,一边可在现实空间中确认动作。 此外,通过使用UC-win/Road驾驶模拟器,还可进行RoboCar(R)的驾驶。 |
| AURELO(增强现实)位置决策系统 |
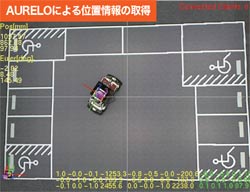
| 为了进行RoboCar(R)的适时模拟,UC-win/Road需要把握正确位置信息。RoboCar(R)运用行驶距离计测法推算现在的位置。行驶距离计测法通过计算车轮、电动机的运转次数,根据旋转数的不同等算出位置。但是,该手法会因为车轮的滑动、车轮宽度的变动等错误,导致行驶距离的计算出现误差。 为了解决这个问题,需要通过GPS定期获取实际位置信息。 AURELO(增强现实位置决定系统:Augmented Reality Localization System)是追踪RoboCar(R)绝对位置、方位信息的系统。从过实时摄像头获取被称为ARMarker的标记的三维坐标(x,y,z)及方位(α,β,γ)。 通过同时使用两个不同模式的标记,可实时测定RoboCar(R)的位置和方位。当照相机和标记间的距离小于1.5m时,测定误差小于7mm,方位角小于2度。照相机离得越远测定精度会降低,但可从更大范围获得坐标(图5)。
|
|||||
| 运用RoboCar(R)的自动停车系统 |
目前,作为RoboCar(R)的功能之一,FORUM8正在开发从任意地点向指定停车位置进入车库、自动纵列停车的自动停车系统(图5)。RoboCar(R)与UC-win/Road的模型保持同步,自动停车的样子可以在VR中确认(图6)。UC-win/Road中运用VR可简单再现与现实同样的停车场,因为可以自由变更视点,可从各个方向确认自动停车的样子(图7)。RoboCar(R)的自动停车系统中使用了AI(人工智能:Artificial
Intelligence)。AI是指,在计算机上实现与人相同的智能处理的技术。这里是进行经路的探索和决策(图8)。
RoboCar(R)现在的位置使用的是AURELO的位置和方位信息。此外,停车目标地点基于自动停车系统所持有的停车场地图。通过随时获得RoboCar(R)的正确位置信息,当与经路发生偏差时,AI会立刻对路径进行修正。AI除了能从多条路径选择有效路径,还可以回避路径上的障碍物,并且探索新的路径等,基于人驾驶时相同的考虑进行动作。UC-win/Road中支持采用驾驶方向盘的驾驶模拟。这次,作为新功能开发了力反馈功能。力反馈是指,通过对方向盘增加抵抗感的功能,可根据旋转量增加阻力感。自动停车系统中,像实际的自动停车支援系统一样,自动再现方向盘旋转的样子。通过按下方向盘上的按钮可控制开始和停止。并可进行加油、刹车操作。这次的自动停车系统是从RoboCar(R)外部进行控制,今后也预定搭载到RoboCar(R)内部。RoboCar(R)除了自身从AURELO获取信息、探索决定路径外,基于立体照相机等传感信息,也可用于自身探索可以停车的空位等,以推进更加接近现实的自动停车功能的开发。 |
|||||||
| (Up&Coming '11 盛夏号刊载) | ||
 |