
车辆机器人平台与虚拟现实的融合
UC-win/Road for RoboCar® 插件
初版发布:2010.09.21
- ¥22,000
程序概要
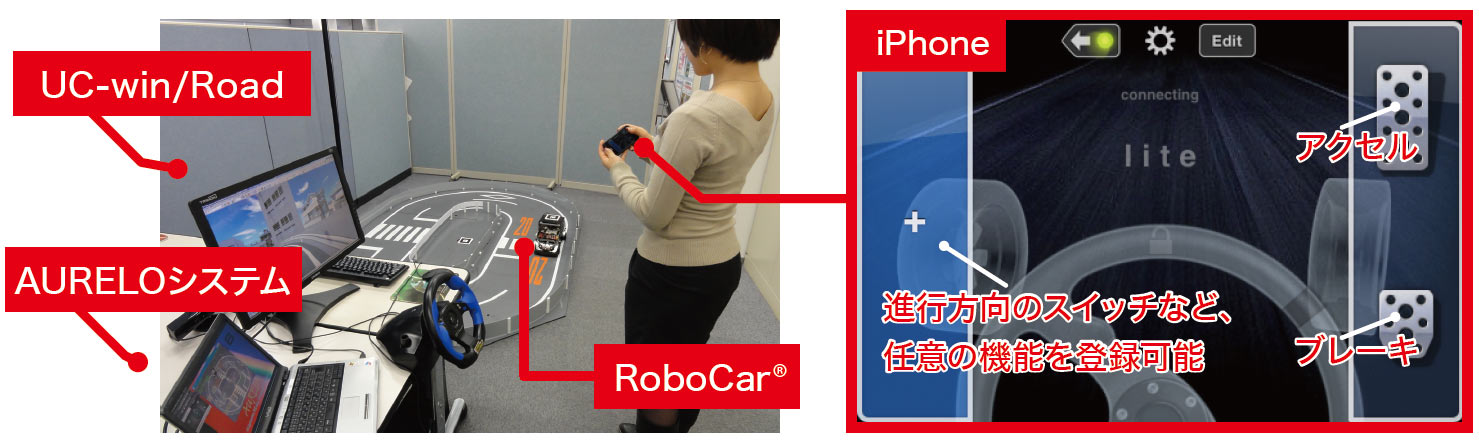
该插件是连接-UC-win/Road与车辆机器人平台scale model车辆RoboCar的虚拟现实VR模拟系统。 具有驾驶模拟功能的虚拟现实软件UC-win/Road与搭载了机器人技术的车辆机器人平台<Robocar>连接的VR模拟系统。该VR模拟系统可以在VR空间的道路上通过驾驶控制实车10分之一规模的scale model车辆。利用VR技术表现的虚拟现实可设置精致的空间、丰富的交通环境以及脚本并进行试乘。

▲制作模型等行驶环境后可在VR空间行驶(左图)、UC-win/Road for RoboCar®(右图)
相关信息
- ◆相关讲座
- UC-win/Road DS体验讲座
程序的性能和特点
RoboCar®
-
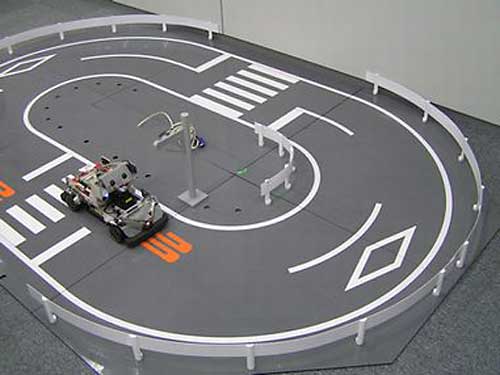
该VR模拟系统可以在VR空间的道路上通过驾驶控制实车10分之一规模的scale model车辆。利用VR技术表现的虚拟现实可设置精致的空间、丰富的交通环境以及脚本并进行试乘。是可以广泛应用于车辆机器人的研究开发、尖端安全汽车以及ITS的研究开发的系统。


▲在办公室内行驶的RoboCar(R);
▲支持车辆性能设定的RoboCar®
UC-win/RoadとRoboCar®连接
-
UC-win/Road可以构建精致的空间环境,多种多样的交通环境,通过设定脚本,实现在虚拟空间的试驾体验。另一方面RoboCar®只有实车的10分之一的大小,也可以在现实世界里进行试驾。通过结合以上的特点、在实现虚拟世界里无法验证的数据,可以在在复合现实上进行模拟验证。
▲利用模型创造行驶环境(左图)、VR空间内的模拟行驶(右图)
运用场景、使用实例
-
- 智能汽车的研究与开发
- 尖端安全汽车与ITS的开发研究
- 紧急制动助手技术的研究
- 自动停车的研究
- 自动行驶算法的研究
- 群组控制
- 辅助驾驶技术的开发 など
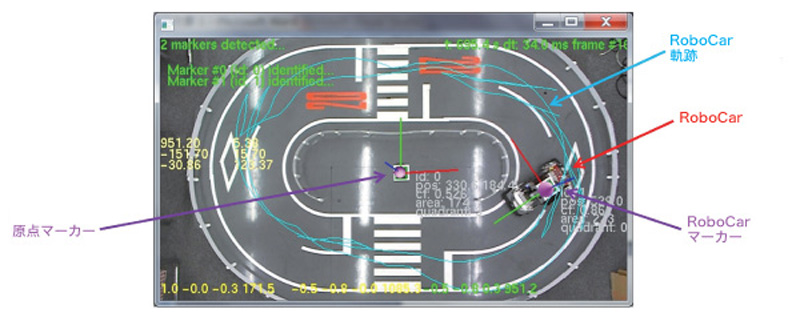
日志例
-
▲日志图像
▲移动轨迹的计算
多样的行走环境、相互作用、脚本
-
支持设定天气和路面状况实现多样的环境设定。模拟行驶时、支持反向车和行人的相互作用以及脚本设定。支持摩托车行驶。




▲可以设置多种多样的行驶环境,相互作用,脚本
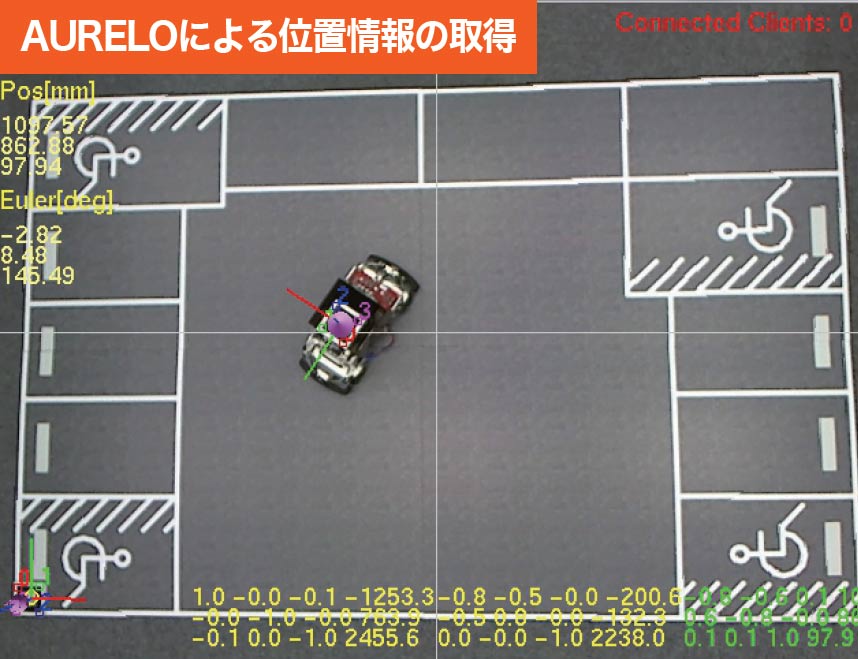
UC-win/Road for RoboCar® Ver.2 AURELO 对应版本
-
- 基于各车辆和主发动机的相对值编码器功能,实现辨别RoboCar®的位置和方向测定功能。
- 通过激光测距仪,红外线传感器,立体相机等,可以识别和最近障碍物的距离测定,可以识别自主导航已知模式。
- 基于无线适配器可以远程访问RoboCar®
- 加速器、Gyro
- 温度传感器
基于扩展现实位置系统的3D识别功能
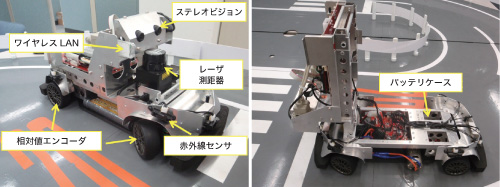
▲RoboCar®
▲AURELO上的预览图
系统提案
-
通过红外线深度传感器进行车辆制动和驾驶操作
通过连接UC-win/Road、在Kinect(TM)的前面模拟手握方向盘的动作,可以实现操作VR空间内的车辆。
Kinect(TM)会通过检测驾驶员的双手的位置实现车辆的操作,加速,以及制动变化。
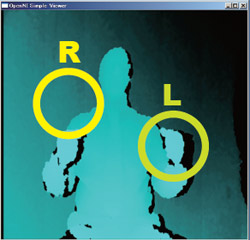
▲方向盘操作(右转・左转)
通过6轴运动传感器实现的模拟驾驶
利用Iphone的六轴传感器、实现在UC-win/Road上的模拟驾驶。
通过连接UC-win/Road,实现利用Iphone操作RoboCar®。转动iPhone实现车辆操舵、加速和制动通过Iphone画面现实的按钮实现。
车辆模型×机器人技术 (ZMP公司开发)
-
- 立体图像处理模块
模型车里搭载了立体相机和图像处理模块,可以实现实时的图像处理。在研究室内可以验证自主行走系统的算法
- 红外线测距仪
配备有红外测距传感器,可用于障碍物检测和辅助驻车。
用户可以通过安装工具,自由的将传感器安装在车体的前方,后方,侧面等位置。
- 小型位置测距仪
可以选择安装小型激光测距仪。。
对于全面研究自主控制系统是最佳选择。 - 电动汽车系统
由ECU(电子控制组件)的主控制器来控制电动机、驱动用电动机以及操作用伺服电机、提供电气汽车系统。
- 利用无线通信的远程控制
搭载了WiFi通信模块可以通过电脑以及远程控制器操作scale model。 -
回避障碍物
算法的验证
自动驾驶的研究
车辆模型×机器人技术 (ZMP公司开发) ZMP公司:http://www.zmp.co.jp/ RoboCar® RoboCar® & SDK : ¥800,000(税別) >> UC-win/Road SDK
▲RoboCar®
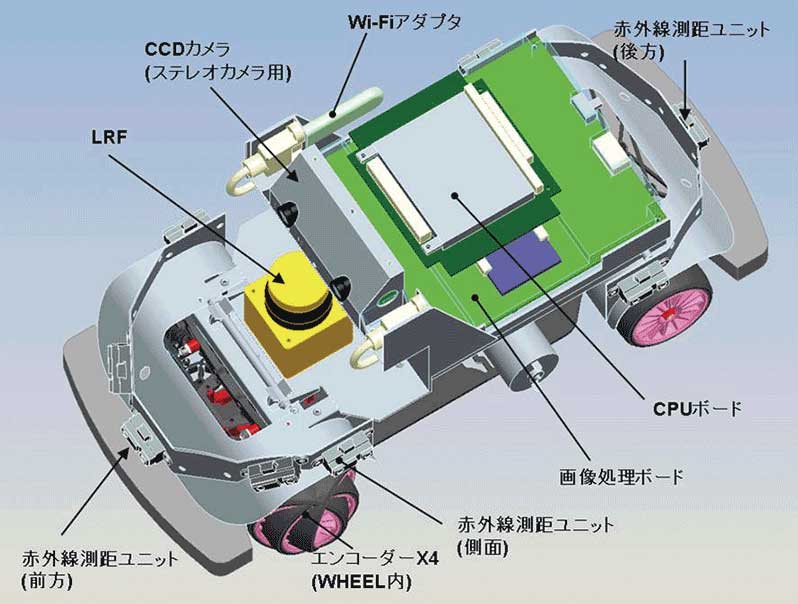
▲本体结构效果图
■多样的环境识别平台
■模型电动汽车
■使用例
- 立体图像处理模块
UC-win/Road RoboCar® Auto parking plugin
-
- 与UC-win/Road进行同步可以在VR上确认停车状态。
- 同过本系统可以从任意的地点开始,停入指定车库,也可以自动竖向停车。
- 使用在UC-win/Road上编辑出的VR环境,可以简单的再现现实世界的停车场场景。
- 可以自由的变换视点,从各个方向确认自动停车的状态。
- AI(人工知能:Artificial Intelligence)搜索路线,确定路线
- 行进路线发生偏离时,会立即修正路线。
- 多条路线时会自动选择效率最佳的路线
- 回避路线上的障碍物,并同时检测新的路线
- RoboCar®的位置信息AURELO(增强现实位置确认系统:AUgmented REality LOcalization system)使用位置,方向信息,停车目标点基于自动停车系统内部的停车场地图。
- 将会向RoboCar®内部搭载制动系统。从AURELO获取信息,搜索行进路线、决定路线的技能以外,将通过立体摄像机等传感器等获取的信息,实现RoboCar®可以自动寻找可以停车的位置。实现更加现实的自动停车技术。
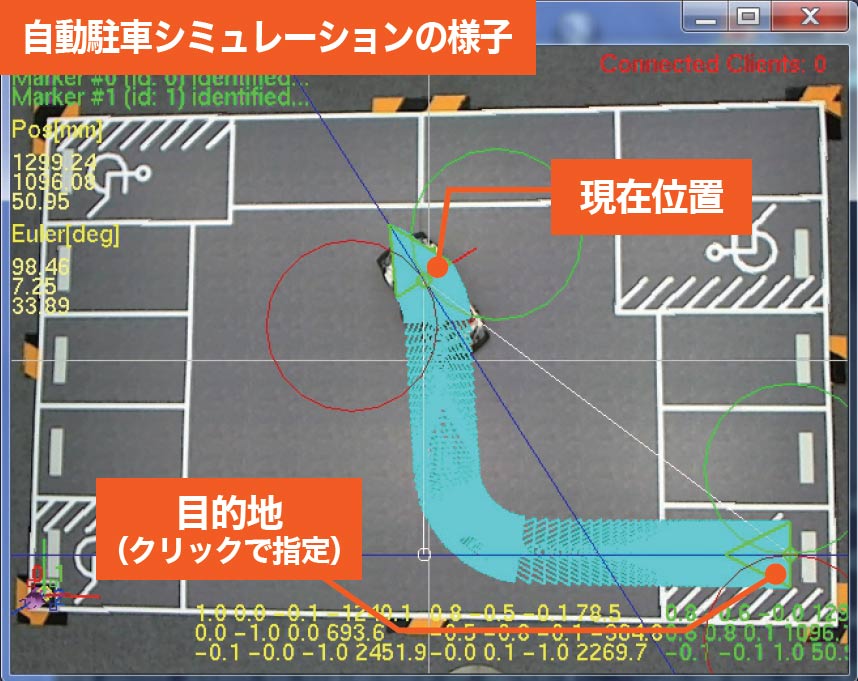
通过与UC-win/RoadとRoboCar®进行连接、以照相机图像,超声波传感器获取的信息为基础,该系统将会自动进行停车时的方向盘操作。驾驶员在车外只需要按下一个按钮,汽车就可以自动进行停车所需的所有步骤。
▲RoboCar®自动停车系统概要
RoboCar®自动停车系统

▲在UC-win/Road上确认自动停车状态。
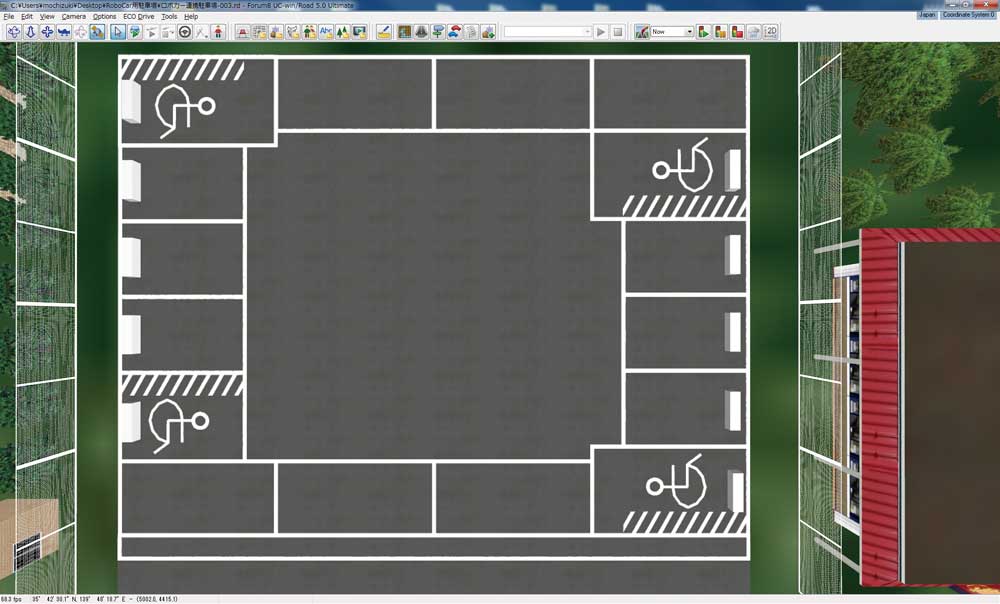

▲从任意视点确认停车场的状态。

开发计划
产品价格
产品价格
-
UC-win/Road软件价格
■产品价格
产品名
价格
产品构成
RoboCar® & RoboCar® SDK 2010 OPEN RoboCar®
+
RoboCar® SDK 2010RoboCar® & RoboCar® SDK 2010
Professional PackageOPEN RoboCar®
+
RoboCar® SDK 2010
Professional PackageUC-win/Road for RoboCar® 插件 ¥22,000 单独插件 ■浮动授权价格
额外支付定价的40%,将可以在任意地点和任意PC上使用。
产品名
价格
RoboCar® & RoboCar® SDK 2010 OPEN RoboCar® & RoboCar® SDK 2010
Professional PackageOPEN UC-win/Road for RoboCar® 插件 ¥8,800
>>点击查看授权详情
订阅价格
订阅价格
-
■服务内容
・免费提供版本升级 ・电话技术咨询服务
・咨询服务(电子邮件、FAX) ・下载服务 ・维护信息传送服务
对应产品 第1年订阅费用 往后每年 订阅(UC-win/Road for RoboCar® 插件) 免费 ¥8,800 订阅(UC-win/Road for RoboCar® 浮动租赁授权) ¥12,320
租赁授权/浮动租赁授权价格
■租赁授权:以低廉的价格,短时间使用产品。
■浮动租赁授权:通过网络认证,可以在任意地点、任意电脑使用。
■临时租赁授权:可以在现有产品授权的基础上临时增加授权数量。以租赁许可期限(1到3个月)为单位进行授权,并根据使用记录进行收费。提前预约,可享受租赁授权15%的价格优惠。可以通过用户信息页面申请。
※租赁授权/浮动租赁授权使用开始无法更改期限,如需延长期限需要再次申请。
租赁授权/浮动租赁授权
-
■租赁授权
对象产品 2个月 3个月 6个月 UC-win/Road for RoboCar® 插件 ¥9,900 ¥11,660 ¥14,300 ■浮动租赁授权
对象产品 2个月 3个月 6个月 UC-win/Road for RoboCar® 插件 ¥16,500 ¥19,580 ¥24,200 

LOADING