
株式会社フォーラムエイト
オートモーティブ アドバイザー
松井 章
Akira Matsui
1959年生まれ。三重県伊勢市出身。大学卒業後、1984年に某自動車会社に入社。空力性能を中心としたクルマの運動性能評価を担当。
その後、電子制御システムの開発部署に異動し、ABS/ESPやADAS/AD関連の開発に従事。さらに、インフラ協調システムや、MaaSの企画・開発も担当。退社後、現在は、フリーランスとして、クルマ開発に関する各種業務を受託。
第6話 クルマの電子プラットフォーム
はじめに
第6話は、いままでご紹介してきた「CASE」を実現するための基盤技術である電子プラットフォームに関連する話題です。詳細は後述しますが、電子プラットフォームとは、クルマに搭載された電子部品を連携し、クルマ全体を統合的に制御するための骨格のようなものです。
この講座では耳タコの最頻出のセリフですが、あえて言わせてください。近年のクルマのエレクトロニクス化の進展は著しく、電子プラットフォームの出来栄えが、クルマの魅力やコストを左右するといっても過言ではありません。とりわけ、電子プラットフォームを構成するソフトウェアは、重要な要素です。ソフトウェアによって価値や機能がきまり、販売後もソフトウェアのアップデートが可能な機能を装備したクルマはSDV(Software Defined Vehicle)と呼ばれています。
自動運転や運転支援システムの機能や、BEV、HEVなどの仕様・性能などは、CMやカタログで取り上げられ、多くの関心を集めますが、その技術的なバックボーンである電子プラットフォームの存在を忘れてはいけません。次の項目では、電子プラットフォームと関連するキーワードをいくつかピックアップして、ご紹介いたします。
電子プラットフォーム
「プラットフォーム」とは、そもそもは「平らな形」という意味ですが、現在はいろいろな業界でいろいろな意味として使われています。駅では、乗降場を示す「ホーム」の意味ですし、ITの世界では、「基盤となるハードウェア、ソフトウェアの環境」といった意味で使われ、「GAFA」がプラットフォーマー(プラットフォームの運営者)として大きな影響力を持っているのは、よく知られています。
クルマ業界での「プラットフォーム」は、ボディの基本構造や足回りの形式など、クルマの体格を決める骨格部分である「車台」のことをいいます。「車台」が決まれば、クルマのサイズや駆動方式、搭載できるエンジン・変速機などがおおよそ決まります。外板ボディや内装部品のように車名毎にデザインが異なる複数の車種で、共通の「車台」を用いることにより、開発・生産コストの削減を行っています(図1)。

図1 電子プラットフォームのイメージ
電子プラットフォームとは、この「車台」に対応する言葉で、「電子的な車台」とでもいうべきものです。複数の車種で、共通の電子プラットフォームを使用することにより、「車台」と同じく、開発・生産効率の最適化を目指すものです。「電子プラットフォーム」は「車台」とは、必ずしも一対一で対応するわけではなく、複数の「車台」で共通化する場合も逆もあります。
電子プラットフォームの主な構成要素は、ECU(Electronic Control Unit)とセンサー、アクチュエータ、それらをつなぐワイヤハーネスや有線・無線のネットワーク、さらにバッテリーや発電機などの電源システム、もっと言えば接続先のインターネット環境も含みます。ECUは、クルマの各種システムを制御するための頭脳であり、センサーは目や耳、アクチュエータは筋肉、ネットワークは神経に相当します。多くのセンサーを用いて周囲の状況や車両の状態を検出し、ネットワークを通じてECUに入力し、演算した結果をアクチュエータに出力し、クルマの運動や機器を制御します。
必要とされる機能をどの要素に配置し、クルマのどこに搭載し、どんなネットワークで接続するかを構想することが電子プラットフォーム開発という仕事になり、生み出された電子プラットフォームの形のことを「E/Eアーキテクチャ」と呼んでいます。E/Eは、「電気/電子(Electrical/Electronic)」、アーキテクチャは「構成・設計思想・設計方法」の意味です。いままでも、様々なE/Eアーキテクチャによるクルマ作りが行われてきていますが、次世代の本命は、高性能なECUに機能を集中させる「セントラル&ゾーンアーキテクチャ」と言われており、カーメーカー各社にて開発が進められています(図2)。

図2 電子プラットフォームのアーキテクチャの進化
安全性能・環境性能や快適性、ツナガル性能など、次世代のクルマに要求される性能を実現するために必要な技術を取り込んだ最適な電子プラットフォームの企画開発は、クルマ会社に所属するエレクトロニクスエンジニアにしかできない、重要で、やりがいのある仕事だと思います。
ソフトウェアプラットフォーム
ECUには、ソフトウェアを実装したマイコンが一つ以上搭載されています。そのソフトウェアの構造を指す言葉が、ソフトウェアプラットフォームです。なんちゃらプラットフォームがたくさん出てきて少々ややこしいですが、パソコンのWindowsのようなもので、その上でWordやExcelなどの異なるアプリケーションを自由に動かせるソフトウェアの構造のことをいいます。
クルマのソフトウェアの開発においては、エンジン制御やブレーキ制御などのアプリケーションの再利用性向上による低コスト化と開発期間短縮、品質向上を目指し、ソフトウェアプラットフォームの検討が進められています。ソフトウェアをマイコンの種類に依存する部分とアプリケーションの部分に上手く分離し、連携させることにより、アプリケーションの再利用が容易になります。
世界規模でソフトウェアプラットフォームの規格化を進めようとする団体を、AUTOSAR(AUTomotive Open System Architecture;オートザー)といいます。欧州のカーメーカーを中心に、車載ソフトウェアの共通化を目指して2003年に設立された組織であり、規格の名称でもあります。日本でもトヨタ自動車が、「コアパートナー」という中心的な立場になって活動し、他のカーメーカやサプライヤ、ツールベンダーも活動に参画しています。いまや、世界中でAUTOSAR規格に準拠したソフトウェアの製品化が進んでおり、デファクトといってもいい状況です。
OTA
OTA(Over-the-Air)とは、携帯ネットワークを使って、クルマを制御するソフトウェアを配信する仕組みを指します。スマホのソフトウェアが自宅でアップデートされるのと同様にディーラーにクルマを持ち込むことなく、自宅の駐車場などでアップデートされるというものです(図3)。現在では国内外製を問わず多くのクルマがOTAの機能を備え始めています。クルマメーカーは、不具合の早期修正、機能改善、機能追加などが可能になります。ユーザーにとってもクルマのソフトウェアが常に最新の状態に保たれるため、クルマとしての鮮度を保つことができるというメリットがあります。

図3 車載ソフトウェアの更新方法
OTAにはセキュリティと信頼性への配慮が重要です。データの暗号化、認証プロセス、正確なアップデート内容の検証などのセキュリティ対策が必要であり、信頼性の高い通信インフラも必要となります。
どのECUでアップデートデータを受信、保管し、いつ、どのような手段で所望のECUを書き換えるのが効率的で信頼性が高いかという検討は、クルマ全体として考慮すべきであり、まさに電子プラットフォーム開発の真骨頂です。
車両ネットワーク
クルマに搭載されたECUには、他のECUやセンサなどとの情報交換を行うための通信手段が搭載されています。従来は、ECU間の一対一の配線接続で実現してきましたが、必要なデータ量の増大や接続対象の増加により、コネクタサイズやワイヤハーネス重量の増加などの深刻な課題が顕在化してきました。その課題を解決するために、ひとつの配線に複数のECUを接続し、多くのデータの送受信が可能な車載ネットワークの導入が検討されました。1980年頃には、各社独自のネットワークの導入が行われてきましたが、1990年代以降はボッシュ社によって開発されたCAN(Controller Area Network)というネットワークの搭載が標準となっています。ちなみに、最近では、「CANインベーダー」というツールによる車両盗難犯罪の話題がたびたびニュースに取り上げられるため、ご存じの方も多いかもしれません。
CAN以外でも通信速度より低コストを重視したLIN(Local Interconnect Network)や、高速通信、高信頼性を重視したFlexRayなどさまざまなネットワークが採用されています。最近では、車載向けのEthernetの採用が進みつつあります。日本では、日産自動車が2019年に発売した「スカイライン」で、車載Ethernetを採用したことが知られています。その後、多くのカーメーカーで採用されています(図4)。今後のCASEのさらなる発展とともに、外界センシング技術の高度化やシステム間の共有情報量の増加が必至であり、通信速度やデータ量の拡張に対応するため車載Ethernetの普及が進んでいくものと思われます。

図4 車載ネットワーク
サイバーセキュリティ
コネクテッドカーの普及が進むにつれて、自動車は「通信デバイス」へと変化を遂げています。コネクテッドカーは、ネットワークとの常時接続を前提としており、常にサイバー攻撃のリスクにさらされている状態にあることを意味します。実際にハッキングの実証実験も行われており、2015年、アメリカの研究者らは、走行中のクルマのハッキングに成功しています。エアコンやラジオの遠隔操作のほかに、走行に直接係る機能の乗っ取りもできたそうです(図5)。旧クライスラー社は、この脆弱性に対処するために「ジープ・チェロキー」など約140万台のリコールを行いました。どのカーメーカーのコネクテッドカーでもサイバー攻撃の対象となり、同様の事態に追い込まれる可能性があり、各メーカーはサイバーセキュリティ対策に注力しています。
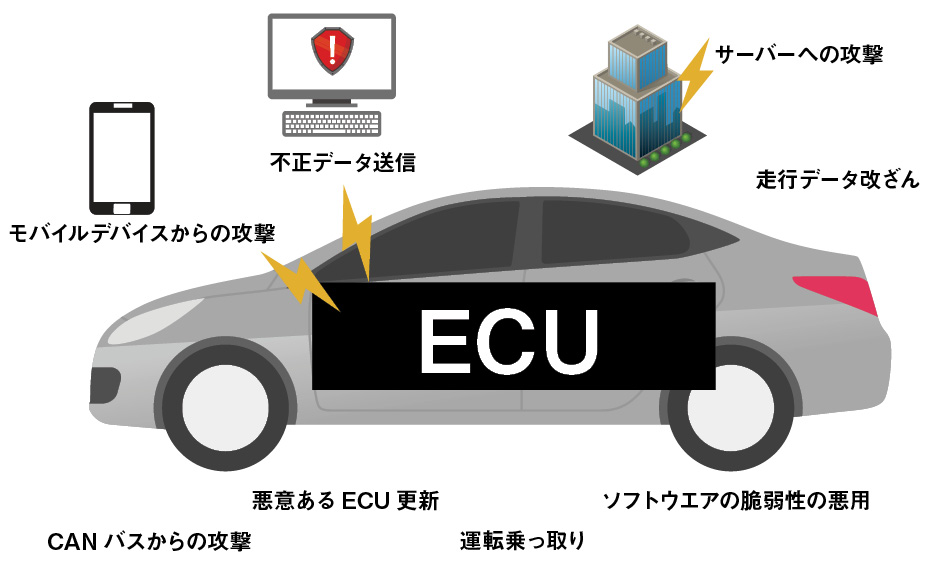
図5 サイバー攻撃
法規面の整備も進められており、2022年1月に国連欧州経済委員会によって、自動車サイバーセキュリティの法規が施行されました。日本でも、同内容の法規が道路運送車両法に取り込まれ、ほぼ同時期に法規制が開始されています。サイバーセキュリティ対策が施されていないと保安基準を満たしていないとみなされ、クルマを販売するための認可が得られなくなりました。
サイバーセキュリティへの対応も、個々の部品単体では限界があり、ゲートウエイによる外部からのアクセスに対する遮断や通信の暗号化など、クルマ全体のシステムとして取り組む必要があり、電子プラットフォームでの対応が必須です。万が一、問題が起こった場合はソフトウェアアップデートなどの迅速な対応が求められ、前述のOTAはサイバーセキュリティ対策には必須の機能となります。
おわりに
今後のクルマの進化にエレクトロニクスの技術が欠かせないものであることには間違いなく、電子プラットフォームの構想如何によって、クルマの商品性が決まります。エレクトロニクスエンジニアには、ますます期待と責任が集中、でもやりがいのある立場だと思います。クルマメーカー、サプライヤを問わず、どの会社もエレクトロニクスエンジニア不足で、一朝一夕の人材育成も困難で、万年、人材難に苦しむ厳しい環境でもあることは想像に難くありません。この講座をお読みの方で、我こそはという方は、ぜひ名乗り出ていただければと思います。
いままさに、いや、すでにずっと続いている正念場。すべての関係者にエールを送りながら、本稿の結びといたします。
いつもご清聴ありがとうございます。
自動運転制御システム(ROS/ROS2)とVRの連携ソリューションを提供
フォーラムエイトでは、AUTOSARに対応したECU向け組み込みソリューション、およびVR・メタバースと連携した自動車開発環境の提供や、AutowareなどROS(Robot Operating System)や、ROS2といった自動運転用のミドルウェアと連携したソリューションについても提供を行っています。
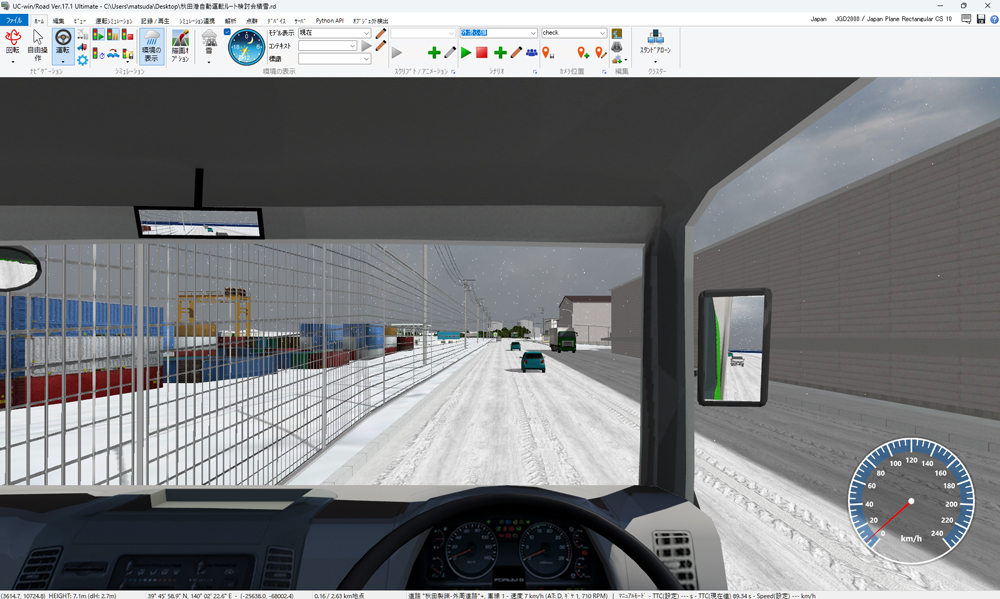
AUTOSAR に関しては、対応したシミュレータ連携ソフトウェアを実装し、CAN経由でAUTOSAR ECUとドライブシミュレータであるUC-win/Roadを連携できるシミュレーションシステムの開発を行っています。UC-win/Roadは、運転情報や制御情報を取得し、マルチモニタによりデジタルツインのVR環境による走行シミュレーションを行うだけでなく、音響装置や振動装置とも連動し限りなく実運転に近い環境を適用できます。また、シナリオ機能により、運転中の様々な環境変化も設定した実験を行うことが可能です。これにより、開発中のAUTOSAR対応ECUとUC-win/Roadを連携した、デジタルツインのVR環境における運転実験シミュレーションを行うことが可能になります。

デジタルツインを活用した自動運転プロジェクト(秋田県港湾部)
(Up&Coming '24 盛夏号掲載)
|
||||||||

 Up&Coming |
