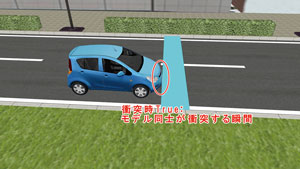
司機的視覺盲點,比如從路邊巴士的死角突然飛奔出來的步行者這壹危險的狀況為例。設定以50Km/h走行的車輛,在距離飛奔出的步行者 所在點還有40m的時刻,步行者開始奔出(圖1)。
 ■圖1 想定內的行動 |
在車正好以50Km/h走行的情況下,如預想的時機步行者會飛奔出撞上。假設車是以30Km/h或者是80Km/h,都會錯過步行者, 從而不會發生撞擊(圖2,圖3)。
 ■圖2 時速30km/h的情況 |
 ■圖3 時速80km/h的情況 |
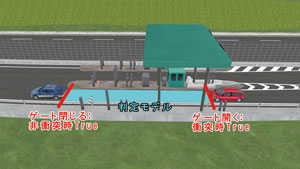
這是因為,自車從步行者出現起到發生撞擊為止的時間根據車速發生變化。根據駕駛員的狀況造成事故存在壹定概率,所以並不能確定這是個理 想的設定。作為解決方案, 可以將撞擊事件的發生時間設定為到達時間。這種到達時間的設定,將車輛在整個過程中的速度因素割離出,在和距離因素無關的條件下模擬出事故。
 ■圖4 設定到達時間 |