 |
 |
|
本連載は、「システム開発」をテーマとしたコーナーです。フォーラムエイトのシステム開発の実績にもとづいて、毎回さまざまなトピックを紹介していきます。第21回は、車両周辺検知機能、カメラセンサー機能について解説いたします。
UC-win/Road 自動運転・ADASパッケージのご紹介
ー車両周辺検知機能、カメラセンサー機能についてー
■はじめに
昨年12月2日に、「UC-win/Road 自動運転・ADASパッケージ(以下、本パッケージ)」をリリースしました。本パッケージは3DVRソフト「UC-win/Road」で使用できる複数のプラグインとアプリケーションをパッケージングしたものであり、自動運転・ADASの研究に活用できます。本パッケージの概要と構成を図1に示します。今回は「車両周辺検知プラグイン」および「カメラセンサープラグイン」について説明します。その他機能につきましては、弊社HPをご参照下さい※1。
 |
| ▲図1 自動運転・ADASパッケージの概要と構成 |
■車両周辺検知プラグイン
ー 機能の説明 ー
運転中の車両周辺にある他車両などのオブジェクトを検知し、オブジェクトの周りに枠線や指定した情報を表示します。図2では、車両や歩行者を囲むように枠線と数字が色分けされていますが、これは速度や運転車両との距離など様々な変数によって色が変化します。
なお、本プラグインと類似するものとしてオブジェクト検出プラグインがありますが、モデルの速度や車間距離などの値を指定して表示させる「指定値表示」、指定値によって枠線と数字の色を変化させる「指定値による色変化」は車両周辺検知プラグインのみの機能です。
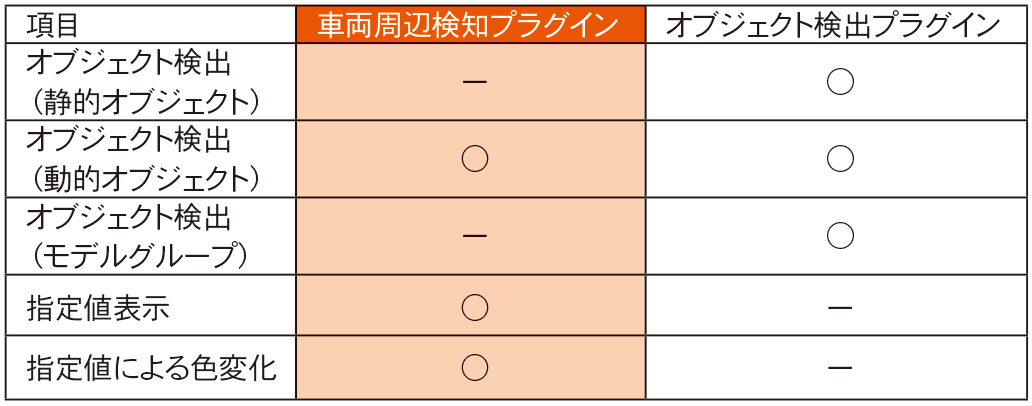 |
| ▲表1 オブジェクト検出プラグインとの比較 |
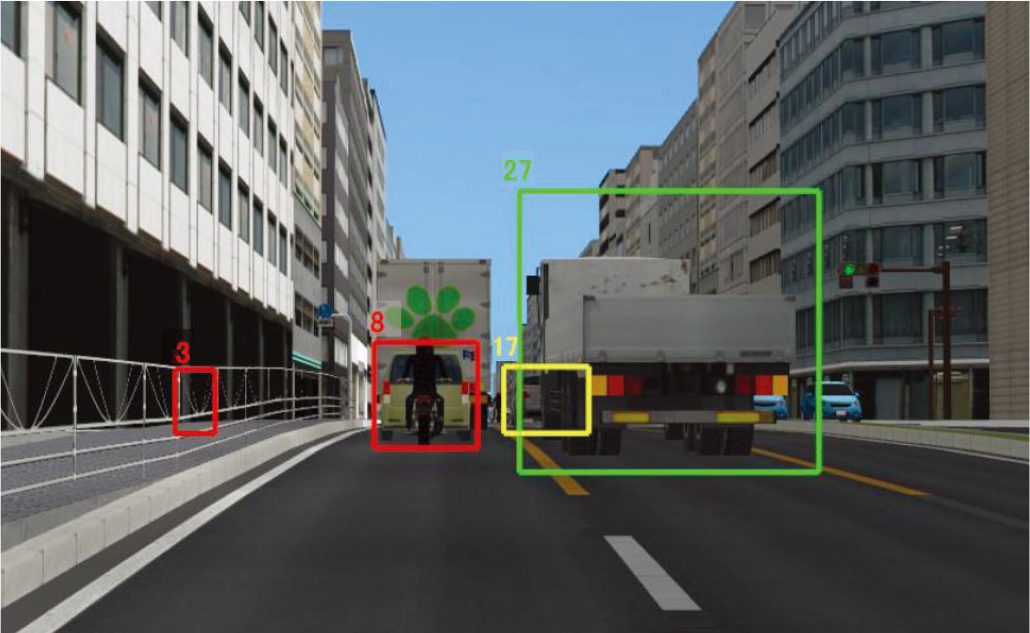 |
| ▲図2 車両周辺検知プラグイン (図中の数字は走行速度(km/h) ) |
ー 今後の展望 ー
自動運転のV2X通信(V2V:車車通信、V2P:車歩通信など)のシミュレーションを行えるように、各種通信フォーマットへの拡張を予定しています。また、各種通信フォーマットを考慮して、運転中の車両周辺にある他車両などのオブジェクトを検知し、オブジェクトの情報を外部へ送信する機能を充実させていきます。
■カメラセンサープラグイン
ー 機能の説明 ー
UC-win/Roadの標準機能では、VR空間内の自由な場所にカメラを配置できます。図3のように複数のカメラを設置することも可能です。図4ではカスタムシェーダーサンプルレンダラーを使用してセグメンテーション化した映像※2であり、AIの画像認識学習にも使用できます。また、図5ではカメラセンサー基本プラグインを使用しており、現実のカメラ映像のような、歪みのある映像を生成しています。
これらの映像は従来UC-win/Road 内で活用していましたが、カメラセンサープラグインによって、新たに汎用的な通信フォーマットで映像を送信する機能を実現しました(図6)。UC-win/Roadの運転車両にカメラを設定し、そこから取得できる映像をUDP通信でリアルタイムに連携システムへ送信可能です。これにより、UC-win/Roadのカメラ映像を外部のソフトウェアのシミュレーションでご活用いただけます。
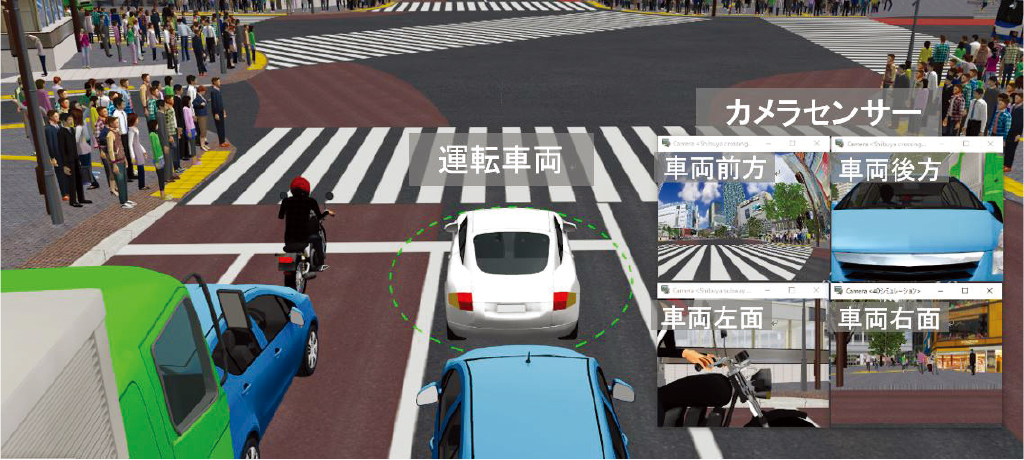 |
| ▲図3 UC-win/Road基本機能 複数視点からのカメラ映像を生成 |
 |
| ▲図4 オブジェクト選別によるセグメンテーション |
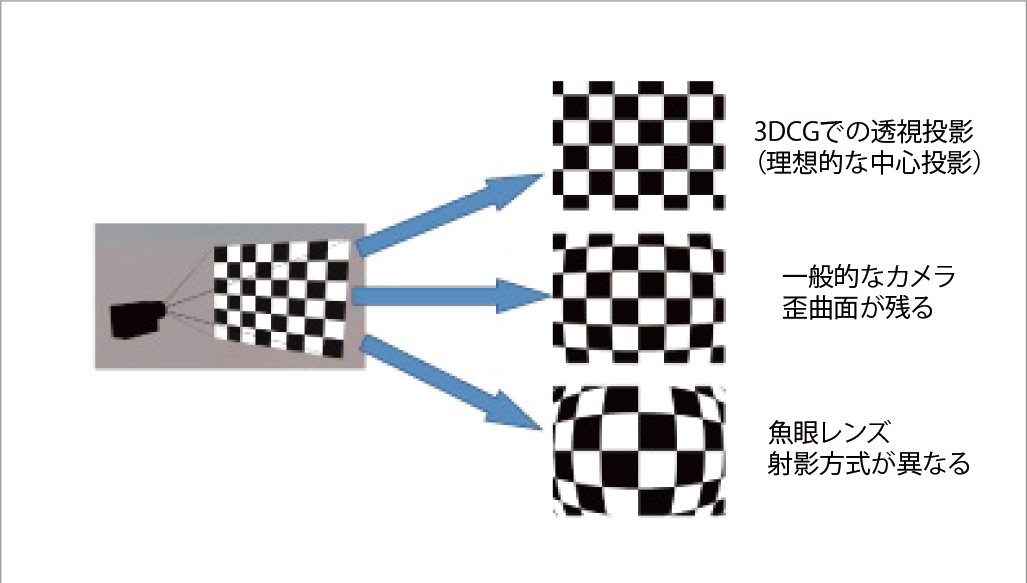 |
| ▲図5 カメラセンサー基本プラグイン 歪あり映像の生成 |
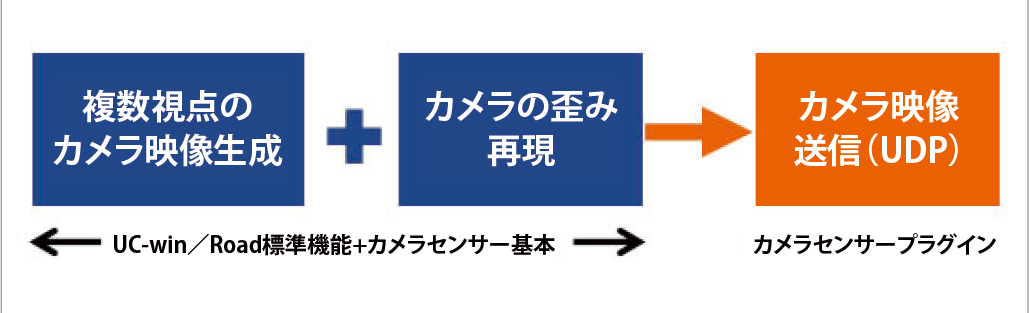 |
| ▲図6 本プラグインの機能 |
ー シミュレーション事例 ー
シミュレーション事例を図7に示します。今回はAutowareと連携した事例をご紹介します(詳細は本誌Vol.137号のシステム開発ニュースに記載)。図中左のCG映像はUC-win/Roadから送られてきたカメラ映像です。これを元に、Autowareは「truck」や「car」など車両を分類していきます。右の図はLidarセンサーのシミュレーション画面です。
 |
| ▲図7 Autowareとの連携画面 |
ー 今後の展望 ー
今後のバージョンアップにて、現実のカメラの特性をより再現できるよう改良することを考えています。具体的には、ブラー、ノイズ、ボケなどのレンズの物理現象を再現できるようにする予定です。また、Lidarセンサーにも対応し、深度情報を外部ソフトウェアに送信できるよう開発を進めてまいります。
■おわりに
今回は自動運転・ADASパッケージのうち、車両周辺検知プラグインおよびカメラセンサープラグインについてご説明しました。車両周辺検知プラグインは、速度や車間距離が定量的に表示されるため、表示の有無によってドライバーの運転がどのように変化するかなど比較分析が行えます。カメラセンサープラグインは、外部に運転時の映像を送信できるため、シミュレーション事例で提示したAutowareによる映像認識以外にも、遠隔地から運転状況を映像で確認するといった作業にも適用できます。
また、本パッケージはプラグインおよびアプリケーションで構成されていますが、環境構築不要でUC-win/Roadがあればすぐにお使いいただけます。また、車両や歩行者モデル等の作成は別途データファイルを作成する必要なく、全てGUIで登録・設置できるのもメリットです。
今後も自動運転・ADASの研究開発に役立つ機能を開発してまいります。ご期待下さい。
●注釈
※1 製品情報「UC-win/Road 自動運転・ADASパッケージ」 https://www.forum8.co.jp/product/ucwin/road/adas.htm
※2 カスタムシェーダーサンプルレンダラーに関しては、UC-win/Road Ver.14からサポートされている https://www.forum8.co.jp/forum8/press/press191105.htm
(Up&Coming '23 新年号掲載)
|
||||||||

 Up&Coming |
