 |
 |
|
Loạt bài này xoanh quanh chủ đề "Phát triển hệ thống". Một số bài sẽ giới thiệu về các chủ đề khác nhau dựa trên kinh nghiệm phát triển hệ thống của FORUM8. Tại bài viết này, chúng tôi sẽ bàn về chức năng phát hiện vật thể quanh chu vi xe và chức năng cảm biến camera.
Giới thiệu về UC-win/Road Autonomous Driving / ADAS Package
-Chức năng phát hiện quanh chu vi xe và chức năng cảm biến camera-
■ Giới thiệu
Vào ngày 02 tháng 12 năm 2022, FORUM8 đã phát hành "UC-win/Road Autonomous Driving / ADAS Package - Gói Lái xe tự hành UC-win/Road/hệ thống hỗ trợ lái xe ADAS" (dưới đây gọi tắt là 'gói này')". Gói này gồm một số plugin và ứng dụng của phần mềm 3DVR "VR Design Studio UC-win/Road" và được sử dụng để nghiên cứu về lái xe tự hành và ADAS. Outline và cấu hình của gói được thể hiện như trong Hình 1. Trong bài viết này, chúng ta sẽ thảo luận về "Plugin Phát hiện quanh chu vi xe - Vehicle Perimeter Detection Plug-in" và "Plugin Cảm biến camera - Camera Sensor Plug-in". Để biết thêm thông tin về các chức năng khác, vui lòng tham khảo trên trang web của chúng tôi*1.
 |
| ▲Hình 1 Tổng quan về Autonomous Driving / ADAS Package |
■ Vehicle Perimeter Detection Plug-in (Plugin Phát hiện quanh chu vi xe)
-Chức năng-
Plugin này phát hiện các đối tượng như các phương tiện giao thông khác, các biển báo giao thông xung quanh phương tiện đang vận hành, đồng thời hiển thị đường khung và thông tin cụ thể của các đối tượng được phát hiện. Trong hình 2, đường khung và số thứ tự của phương tiện khác và người đi bộ được mã hóa màu, thay đổi màu sắc tùy thuộc vào các yếu tố khác nhau như tốc độ và khoảng cách từ phương tiện đang vận hành.
Mặc dù chúng tôi có plugin Phát hiện đối tượng (Object Detection Plug-in) tương tự như plugin này, tuy nhiên chỉ có Vehicle Perimeter Detection Plug-in mới có chức năng "hiển thị giá trị được chỉ định", nó chỉ định và hiển thị các giá trị như tốc độ của mô hình, khoảng cách giữa các xe và chức năng "màu sắc thay đổi theo giá trị đã chỉ định", màu của đường khung và số thứ tự thay đổi theo giá trị đã chỉ định.
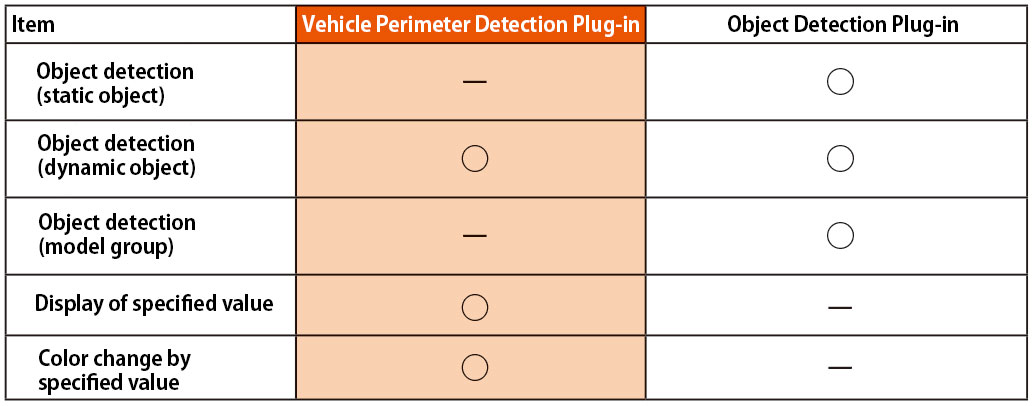 |
| ▲ Bảng 1 So sánh với Object Detection Plug-in (Plugin Phát hiện đối tượng) |
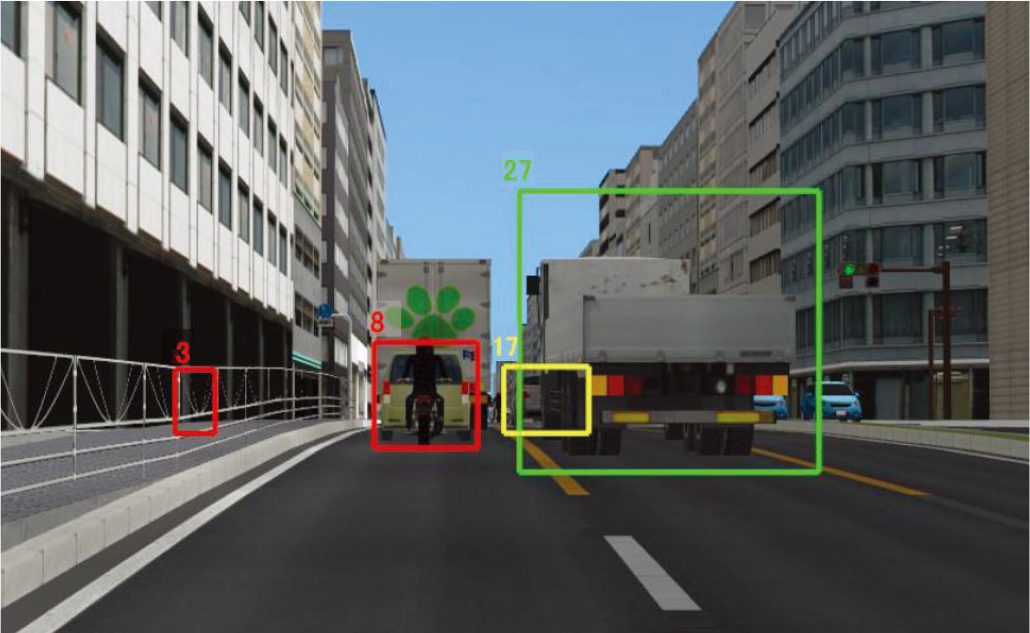 |
| ▲ Hình 2 Vehicle Perimeter Detection Plug-in (Các số trong hình biểu thị theo tốc độ của xe (km/h)) |
-Phát triển tương lai-
Chúng tôi có kế hoạch mở rộng hệ thống sang các định dạng giao tiếp khác nhau để hệ thống có thể mô phỏng giao tiếp V2X (V2V: Giao tiếp Phương tiện với Phương tiện, V2P: Giao tiếp Phương tiện với Người đi bộ, v.v.) áp dụng cho lái xe tự hành. Khi xem xét các định dạng giao tiếp khác nhau đó, chúng tôi cũng sẽ tăng cường chức năng phát hiện các đối tượng xung quanh phương tiện đang vận hành và tải truyền thông tin về đối tượng ra môi trường bên ngoài.
■ Camera Sensor Plug-in (Plugin Cảm biến camera)
-Chức năng-
Bằng cách sử dụng các tính năng cơ bản của UC-win/Road, bạn có thể đặt camera ở bất cứ vị trí nào trong không gian VR. Hình 3 hiển thị việc bạn có thể đặt nhiều vị trí camera. Hình 4 là hình ảnh phân đoạn khi sử dụng chức năng tùy chỉnh Shader*2, chức năng này có thể được sử dụng để học nhận dạng hình ảnh AI. Hình 5 là hình ảnh biến dạng được tạo ra bởi Plugin Cảm biến camera cơ sở (Camera Sensor Base Plug-in), nó tương tự như hình ảnh được chụp bởi camera thật.
Những hình ảnh này trước đây đã được sử dụng trong UC-win/Road, tuy nhiên chúng tôi đã triển khai chức năng truyền hình ảnh ở định dạng giao tiếp cho mục đích chung bằng cách sử dụng Camera Sensor Plug-in (Hình 6). Hình ảnh thu được từ các camera trang bị cho các phương tiện đang vận hành trong UC-win/Road được truyền đến hệ thống liên kết thời gian thực thông qua giao tiếp UDP. Điều này cho phép bạn sử dụng hình ảnh camera từ UC-win/Road cho các mô phỏng sử dụng phần mềm bên ngoài (phần mềm khác).
 |
| ▲ Hình 3 Tạo nhiều góc camera từ các chức năng cơ bản của UC-win/Road |
 |
| ▲ Hình 4 Phân chia đối tượng theo lựa chọn |
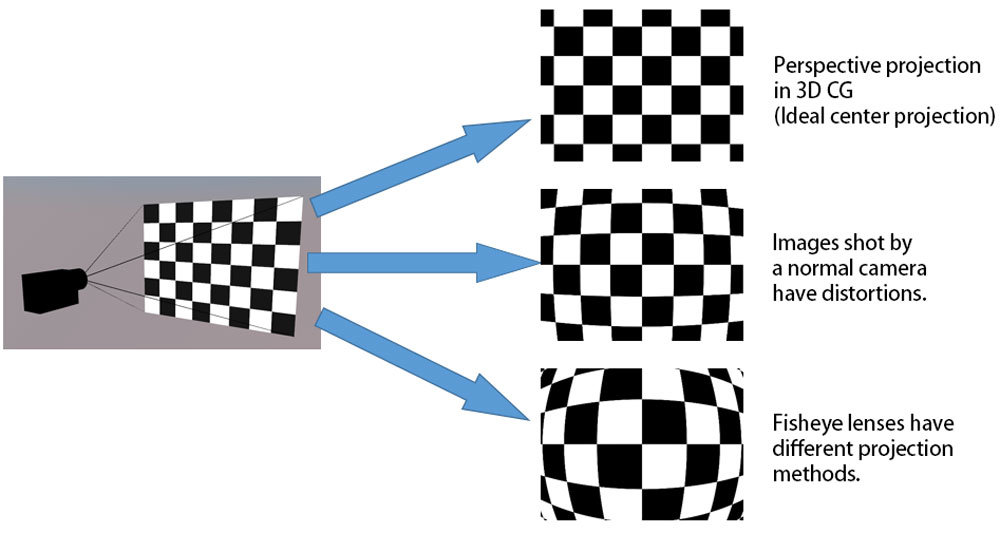 |
| ▲ Hình 5 Các hình ảnh biến dạng tạo ra từ Camera Sensor Base Plug-in |
 |
| ▲ Hình 6 Các tính năng của Camera Sensor Plugin |
 |
| ▲ Hình 7 Liên kết với Autoware |
-Phát triển tương lai-
Trong các phiên bản cập nhật tiếp theo của phần mềm, chúng tôi sẽ cải tiến chức năng này để tái tạo tốt hơn các đặc điểm của một camera thực thụ. Cụ thể, chúng tôi sẽ tái tạo các hiện tượng vật lý của thấu kính như mờ, nhiễu, và nhòe. Ngoài ra, cảm biến Lidar sẽ được hỗ trợ để gửi thông tin chiều sâu đến phần mềm bên ngoài.
■ Kết luận
Trong chủ đề lần này, chúng tôi đã giới thiệu 2 plugin là Vehicle Perimeter Plug-in và Camera Sensor Plug-in từ các chức năng của Gói lái xe tự hành/hệ thống hỗ trợ lái xe ADAS (Autonomous Driving / ADAS Package). Vehicle Perimeter Detection plugin hiển thị tốc độ và khoảng cách giữa các xe, cho phép phân tích so sánh về cách vận hành của người lái xe có thay đổi như thế nào khi thông tin có được hiển thị hay không. Ngoài tính năng nhận dạng video của Autoware được trình bày trong nghiên cứu điển hình về mô phỏng, Camera Sensor plugin có thể truyền tải hình ảnh lái xe ra các thiết bị bên ngoài, do vậy nó có thể được áp dụng cho các tác vụ như kiểm tra điều kiện lái xe từ một địa điểm từ xa thông qua hình ảnh.
Gói này đã bao gồm các plugin và ứng dụng, nó có thể được sử dụng luôn với UC-win/Road mà không cần cấu hình môi trường. Một ưu điểm khác là các mô hình phương tiện và người đi bộ có thể được đăng ký và cài đặt hoàn toàn thông qua GUI mà không cần tạo các file dữ liệu riêng biệt.
Chúng tôi sẽ tiếp tục phát triển các chức năng hữu ích cho việc nghiên cứu và phát triển lái xe tự hành và ADAS.
●Chú thích
*1 Thông tin sản phẩm "UC-win/Road Autonomous Driving / ADAS Package" https://www.forum8.co.jp/english/uc-win/adas-e.htm
*2 Tùy chỉnh Shader được hỗ trợ từ phiên bản UC-win/Road Ver.14. https://www.forum8.co.jp/forum8/press/press191105-e.htm
(Up&Coming '23 Ấn bản Năm mới)
|
|
 Up&Coming |
