Program Overview Program Overview
 |
|
UC-win/Road for RoboCar plug-in option is an integrated simulation system with car robotics platform scale model car "Robocar" and real time VR "UC-win/Road".
VR simulation system can be used to control 1/10 electric car scale model on model road. This can be performed by integrating "UC-win/Road", which is the virtual reality soft with well-developed driving simulation function and "Robo car", which is the car robotics platform mounted robot technology.
This system allows users to create precision space images, many different
styles of traffic environment and scenarios by using virtual space in VR,
and experiment with them. It can be used for research development of car
robotics including autonomous driving, advanced safety vehicle, and ITS. |
|
 Related information Related information |
 New
Product Introduction New
Product Introduction
Movies
Car robotics and VR UC-win/Road for RoboCar® movie (May 17, 2010)
|
UC-win/Road for RoboCar® preview |
|
 |
|
RoboCar® "obstacle avoidance by stereo image recognition" |
|
|
New
Product Introduction
Seminar Information
|
|
Program Functions and Features
|
|
■What is RoboCar®?
- VR simulation system can be used to control 1/10 electric car scale model on model road. This can be performed by integrating "UC-win/Road", which is the virtual reality soft with well-developed driving simulation function and "Robo car", which is the car robotics platform mounted robot technology.
This system allows users to create precision space images, many different styles of traffic environment and scenarios by using virtual space in VR, and experiment with them.
 |
 |
 |
 Running RoboCar® in the office Running RoboCar® in the office |
Setting window of RoboCar®'s
vehicle performance |
■Combination of UC-win/Road and RoboCar®
- In UC-win/Road, detailed representation of 3D space with a wide variety
of traffic situations and scenarios can be achieved, and users can drive
in this 3D space freely, and RoboCar® is a 1/10 scale model of real car
that can be driven around in physical reality. With the combination of
these two products, simulation in mixed realities can be made possible
for tests that cannot be carried out in virtual reality.
 |
|
 |
 |
|
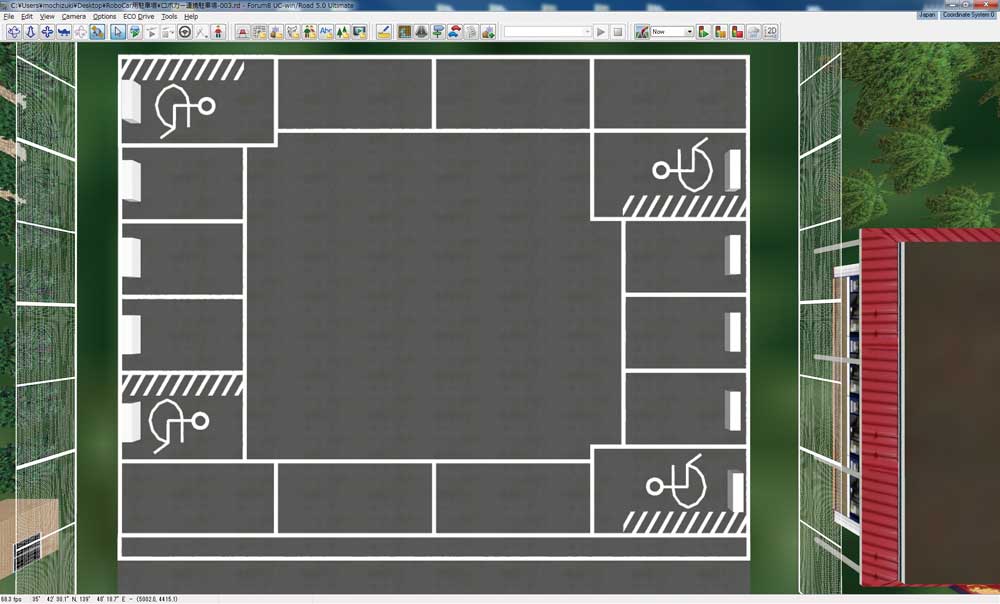
Creating the driving environments (upper)
and running in VR space can be performed. (lower) |
|
|
■Case studies
- R&D of car robotics
- R&D of advanced safety vehicle and ITS
- Research of hazard avoidance assist technology
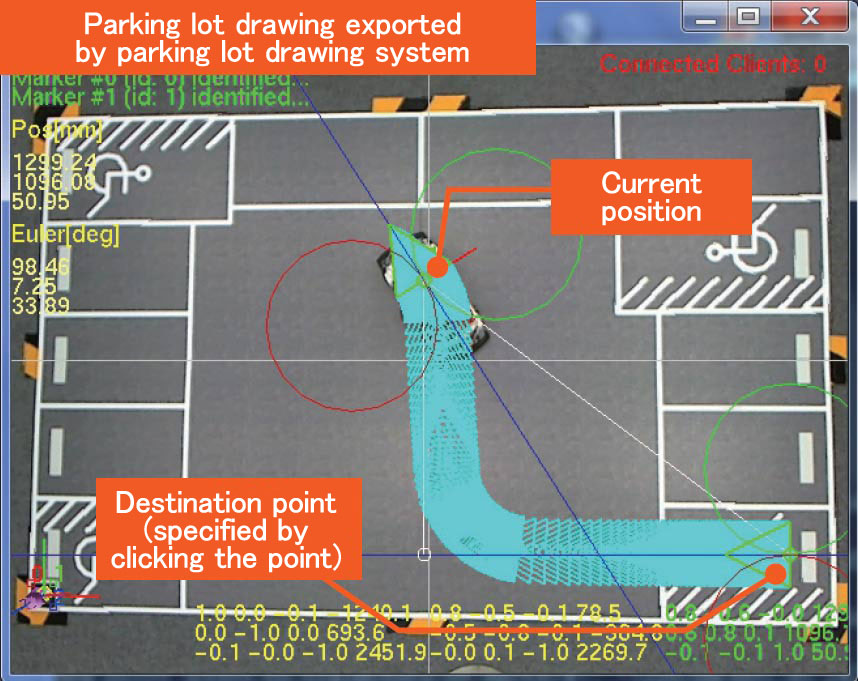
- Research of autonomous parking
- Research of autonomous driving algorythm
- Group control
- Research of infra cooperation
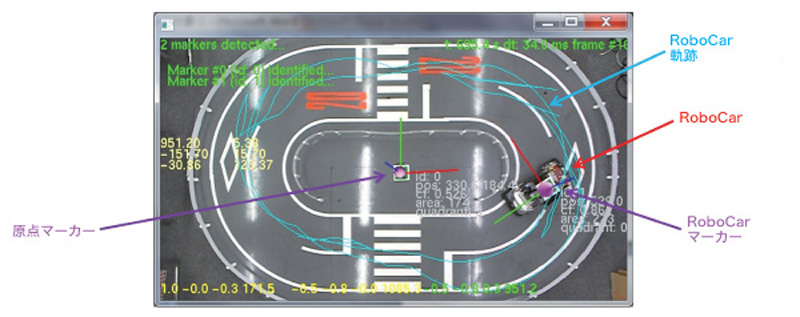
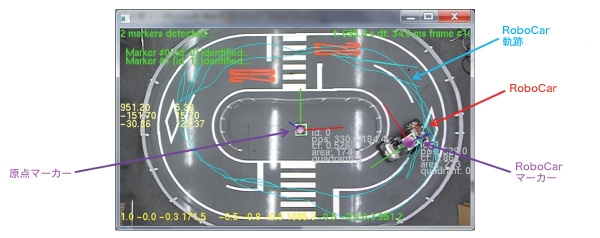
■Data logging
 |
|
 |
| Logged data |
|
Calculation of trajectories |
■A variety of driving environments, interactions, and scenarios
- You can set various driving environments such as weather and road condition,
interaction with oncoming vehicle and pedestrian, and scenarios. Reverse
driving is also supported.
 |
 |
 |
 |
| Various driving environments and interaction can be supposed. |
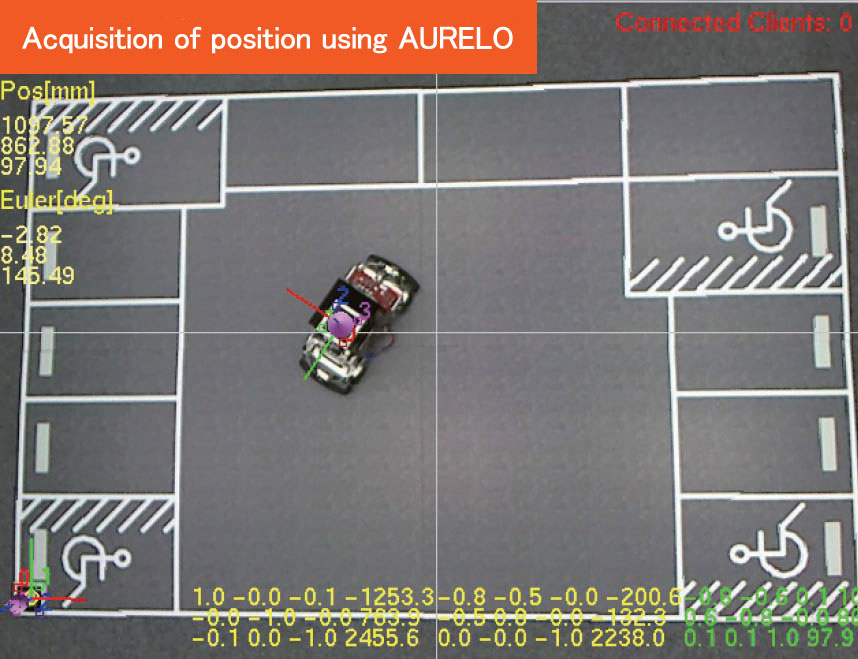
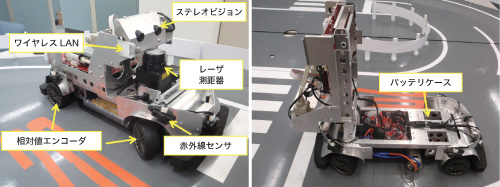
■UC-win/Road for RoboCar® Ver.2 for AURELO
- 3D localization function with AR position-fixing system
- Incremental encoders mounted on each wheel and the main motor to estimate the position and orientation of the RoboCar®
- Laser Range finder, Infrared sensors and Stereo cameras to estimate the distance to the closest obstacles and identify known patterns for autonomous navigation
- Wireless LAN adapter to allow a remote access to the RoboCar® from
a distant
- Accelerometer, Gyro
- Temperature sensors
 |
|
| RoboCar® |
View from AURELO |
■Proposed system
- Vehicle control and imaging of driving operation via infrared depth sensor
Linkage with UC-win/Road enables you to experience the driving simulation by holding the virtual steering wheel and moving the arms. It is possible to keep the natural situation which is very close to the actual driving operation.
 |
|
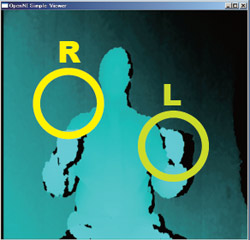 |
| Steering operation (right / left turning) |
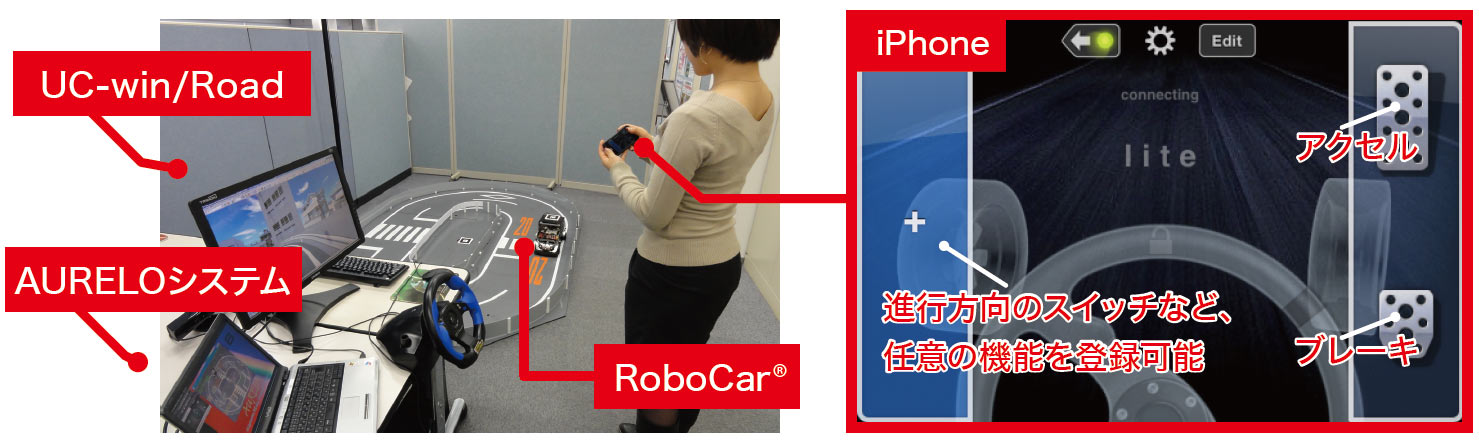
- Driving simulation with 6-axis motion sensor
You can drive in UC-win/Road by using 6-axis motion sensor on iPhone.
Linkage with UC-win/Road makes it possible to operate RoboCar® with
iPhone. Rotate iPhone to control the steering and touch buttons in the
screen to control the pedals.
|
|
 |
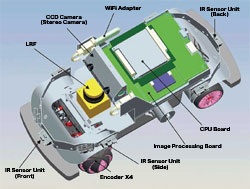 |
| RoboCar® |
Structure of the platform |
 Sophisticated environment recognition platform Sophisticated environment recognition platform
- Stereo camera image processing module
With the built-in stereo camera and image processing module, realize real
time image processing and experiments on autonomous motion algorithms inside
a laboratory.
- Infrared distance sensors
The platform is equipped with infrared sensors that can be used for obstacle detection, parking assistance, etc. Sensors are placed on the front, rear and flanks of the car, users can freely decide of their location.
- Small size laser range finder
As an option, a small laser range finder can be mounted on the platform.
It is very useful to achieve a real autonomous motion system.
Electric car scale model
- Electric car system
As the ECU (Electronic control unit), main controller that controls the
motor driver, the main motor and the servo motor for the steering gear.
We propose a real electric car system.
- Wireless remote control
Using the Wi-Fi module, you can control the model car remotely from a PC
or remote controller. It is useful for research that need direct human
control of the vehicle.
Use case examples
-
Test of obstacle avoidance algorithm |
 |
Research on autonomous driving |
 |
|
|
|