|
美國夏威夷州運輸局為了有效管理全長5000km以上的高速公路從2003年開始引進機
載雷達照相機(LiDAR)。該運輸局在FORUM8的幫助之下,把這十年當中通過測量計算得出的道路構造物的點雲數據在UC-
win/Road當中進行統合, 並製作成有色點雲(point
cloud)數據。這使得道路管理變得更加先進。該運輸局的高速道路調查工程師在今年7月8日夏威夷舉行的國際VR
symposium第五屆Summer Workshop中進行講演,介紹了點雲數據的著色中使用的FORUM8 Photo-log插件的相關情況。
 |
|
 |
| 夏威夷
运输局的建筑物 |
|
瓦胡岛
内的高速公路 |
夏威夷州運輸局管理的道路包括歐胡島和夏威夷島等6個島嶼,合計超過5000英里(約
8000km)。為了管理廣大範圍並分散的道路,2003年開始使用車載式數碼相機記錄道路的狀態的「PHOTO LOG」。
在記錄當中使用的數碼相機的像素正在逐年向高分辨率發展。2003年有1280×1024像素的照相機2台,2006年時有1600×1200像素的照相
機2台,2007年變為3台,2009年時有2048×1152像素的的照相機3台,在2011年時增加到3296× 2472像素的照相機3台。
隨著照相機台數的增加和分辨率的提高,看板的細小污點等也可進行記錄,攝影範圍逐年擴大。
 |
 |
 |
照相机分辨率的
提高使诸如标识和看板的细小污点等也可进行记录。摄影范围逐年扩大。
(上图为2003年、下图为2009年的摄影范围) |
從2009年開始,使用車載式三維鐳射掃描儀來計算及測量路面和道路周邊的構造物等的形狀。精度約為2cm左右。引進了「激光雷達(LiDAR:
Light Detection and Ranging)」。
搭載數碼相機和雷達的車輛可在同一次的運行當中同時記錄照片及點雲數據。
 |
|
 |
| 激光雷达(左)
和车辆搭载示意图(右) |
2009年時使用此方法計算對瓦胡島內的道路100英里(大約1600km)的道路進行測量。測量結果獲得點雲數據的容量大約為630GB,合計超過
2000億點的膨大數字。數據形式是「(Mandli File
Format)」。使用此數據形式的理由是它適合路線數據,可在同一文件夾當中可包括路線全體。
2011年的夏威夷島也同樣使用雷達進行點雲計測。
 |
| 2009
年瓦胡岛内测量大约1600km的范围 |
 |
|
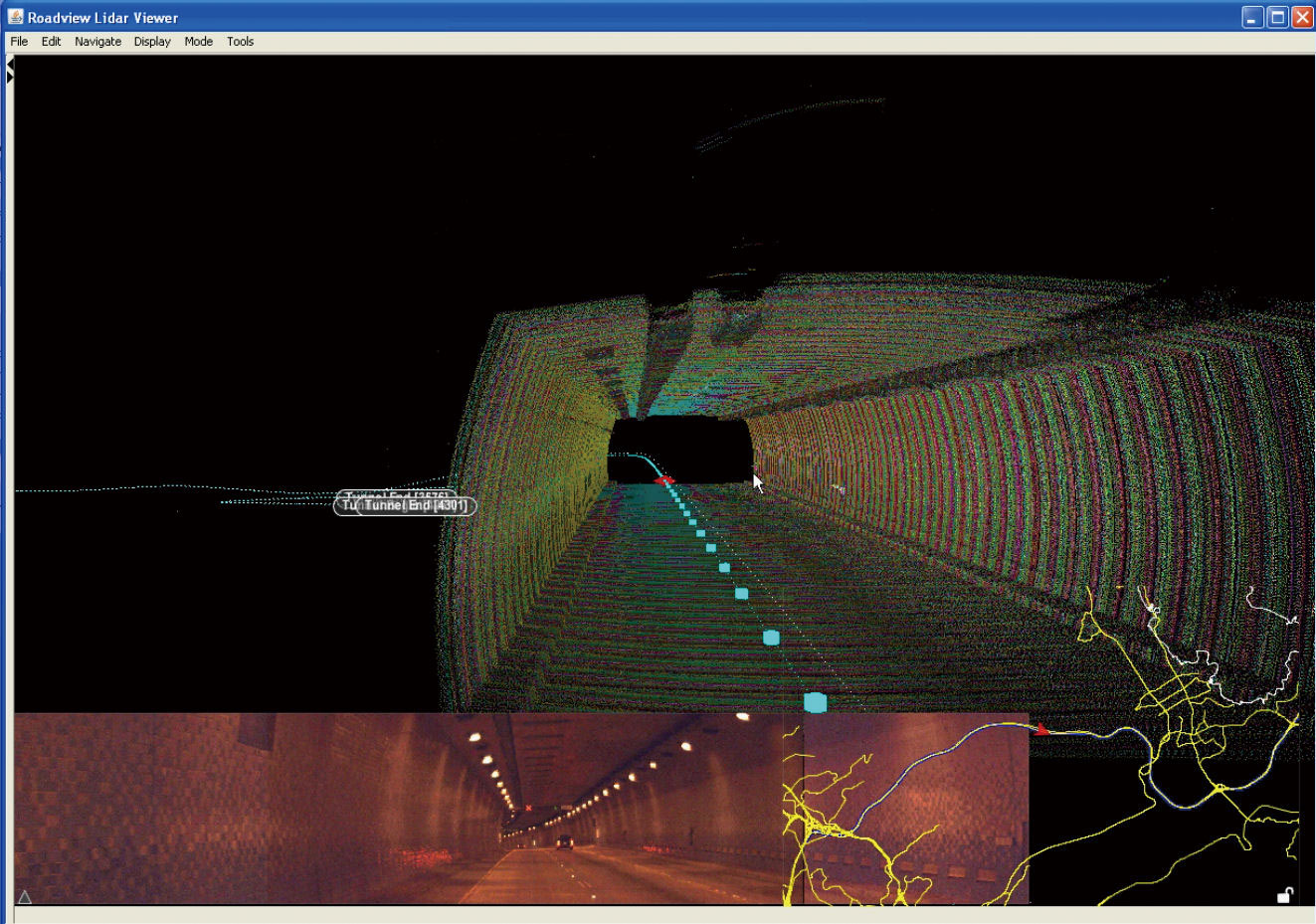
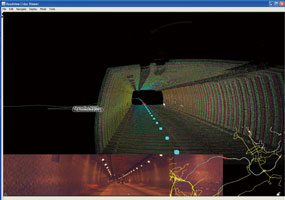 |
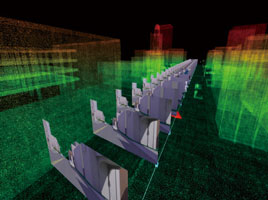
| H-3隧道的坑口(左)与隧道内测量的点云数据(右) |
夏威夷州運輸局全體的統和信息系統開發的目標是,可以給夏威夷設置整體的管理提供幫助的目標。具體目標首先是管理整個循環過程,保證信息的不洩露不丟失。
並且整個運輸局內都可登錄,保證信息完全共有,以及與GIS(地理信息系統)的統合。
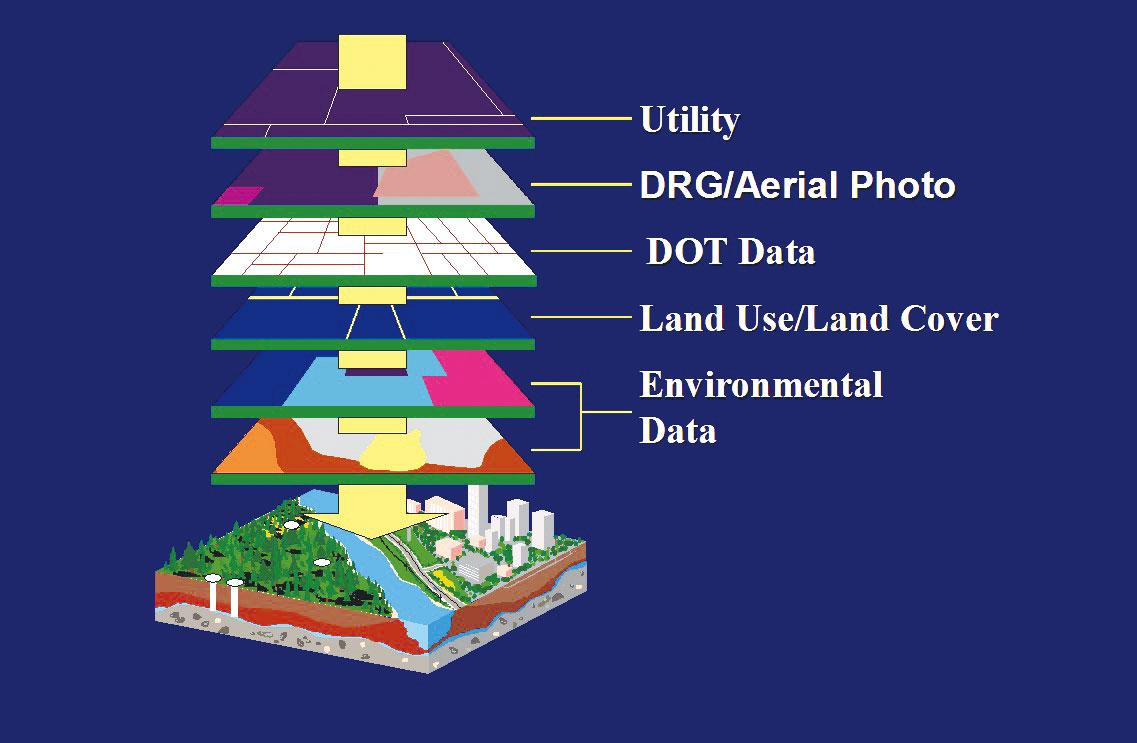
GIS的特徵是可把各種類型的信息綜合成同一信息。比如把航拍圖和生命線的信息,道路設施的信息,土地利用和地表數據,環境數據等統和起來。
為了把各種信息統和起來,該局還導入了可表現在道路上的位置和距離程的「直線參照系統(Linear Referencing
System)」。現在,該局現在使用的工具包括可搭載讀取點雲用應用程序Pointools的三維CAD,Microstation和GIS系統的
GeoMedia 3D。並且還收集點雲信息,以作為活用工具使用。
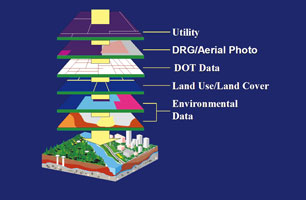 |
| 把各种
信息统和起来观察的GIS概念图 |
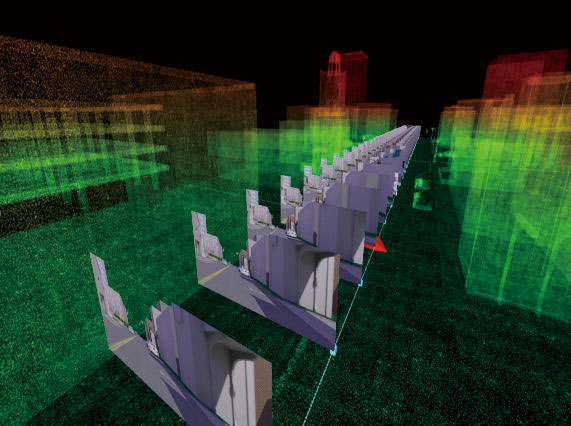
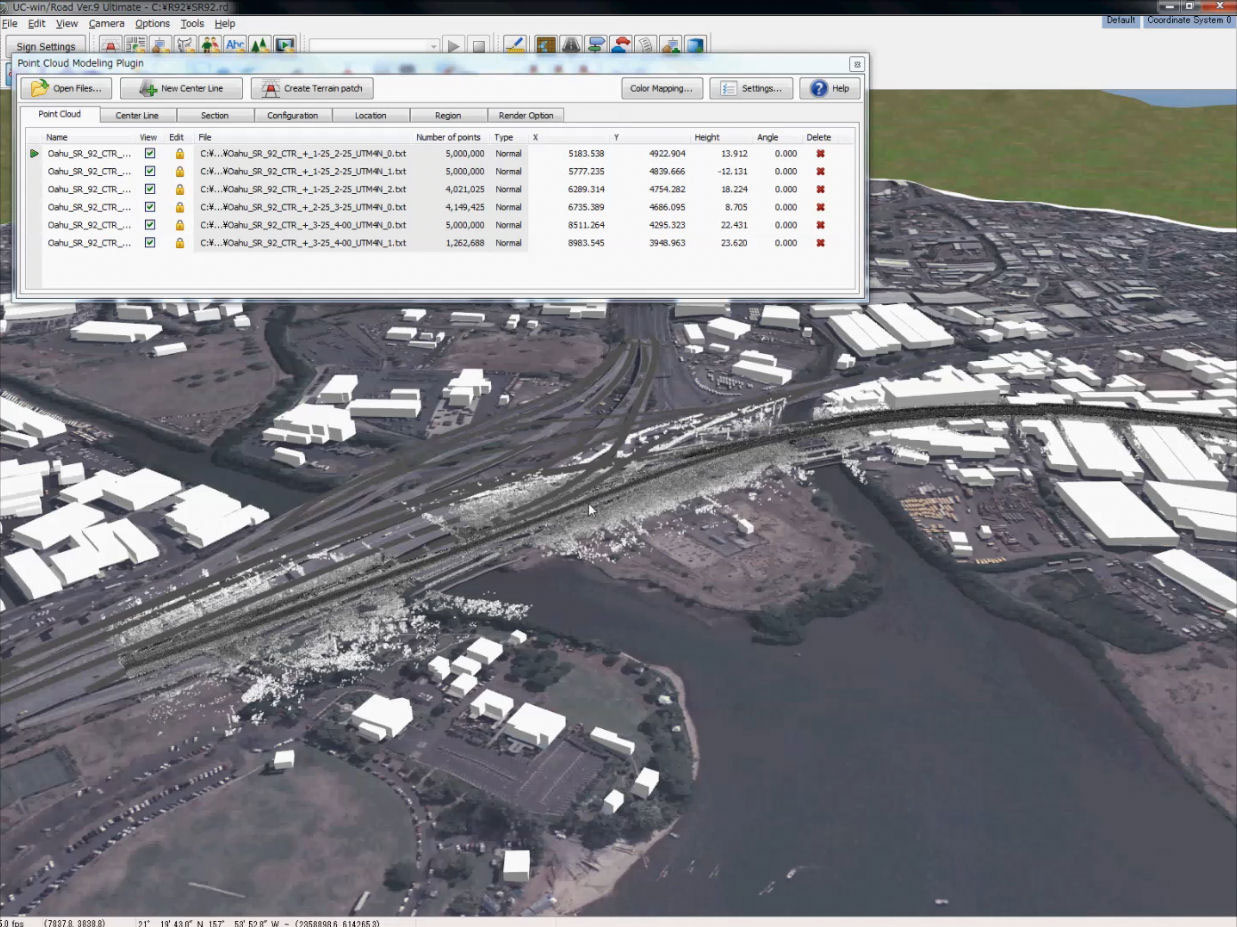
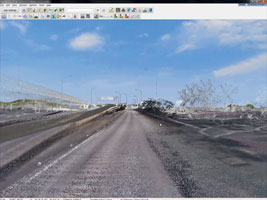
夏威夷州運輸局高速路調查工程師把到目前為止測量到的點雲數據和照片進行合成,並把點雲數據著色。
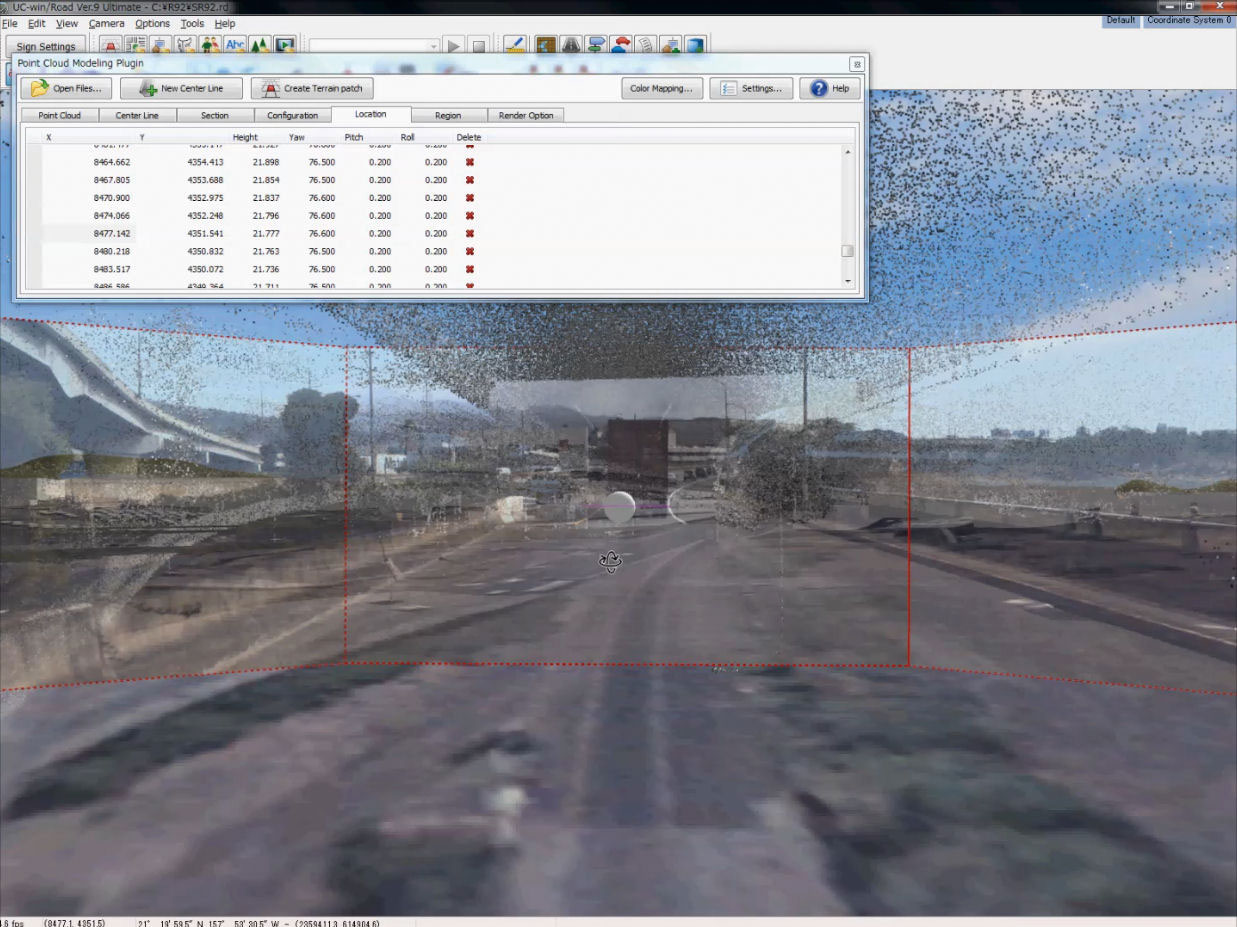
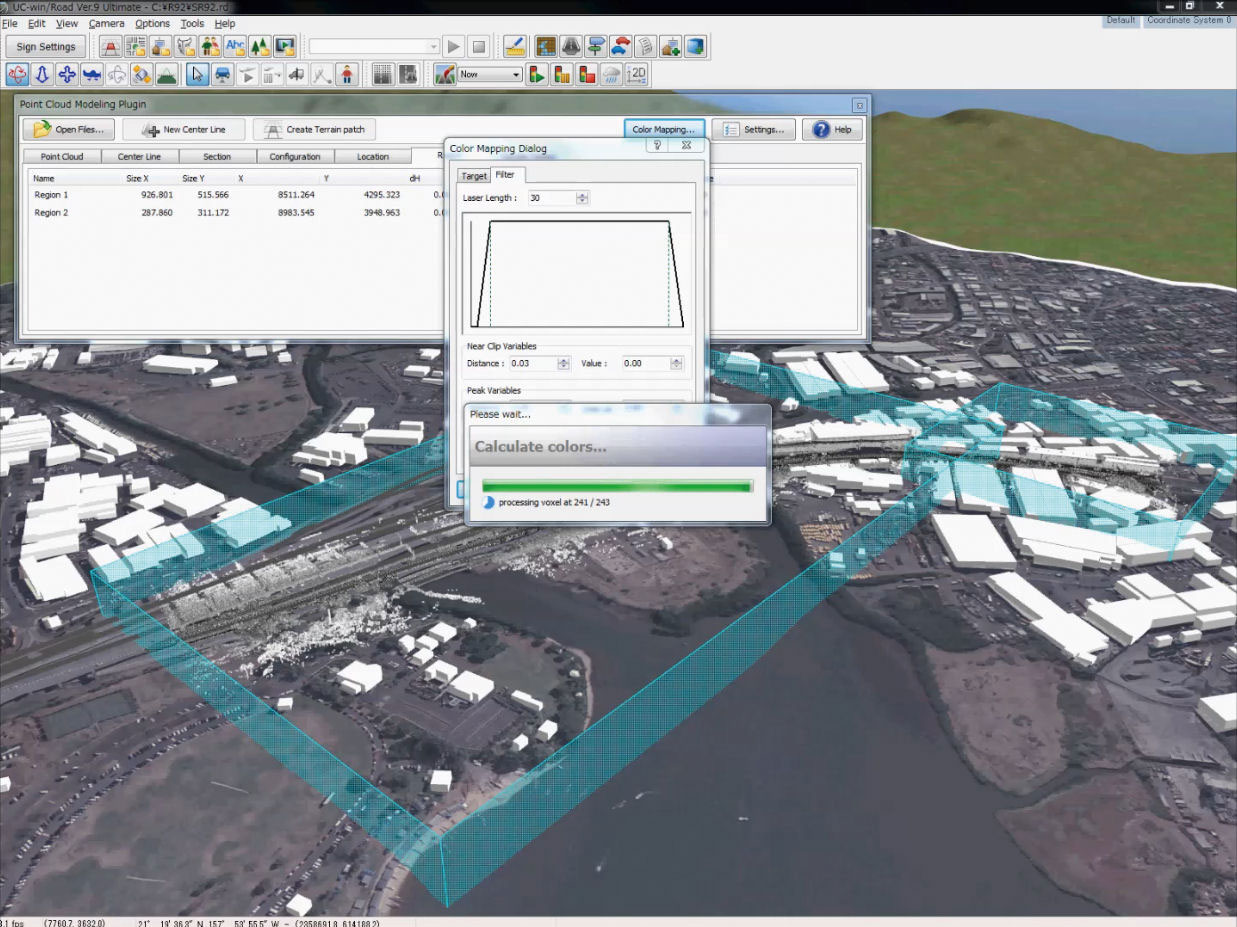
UC-win/Road當中使用點雲插件和照片處理擴展插件讀取點雲數據和照片數據,把各自的測量及攝影位置相吻合併在點雲數據中著色。其結果是,白色的
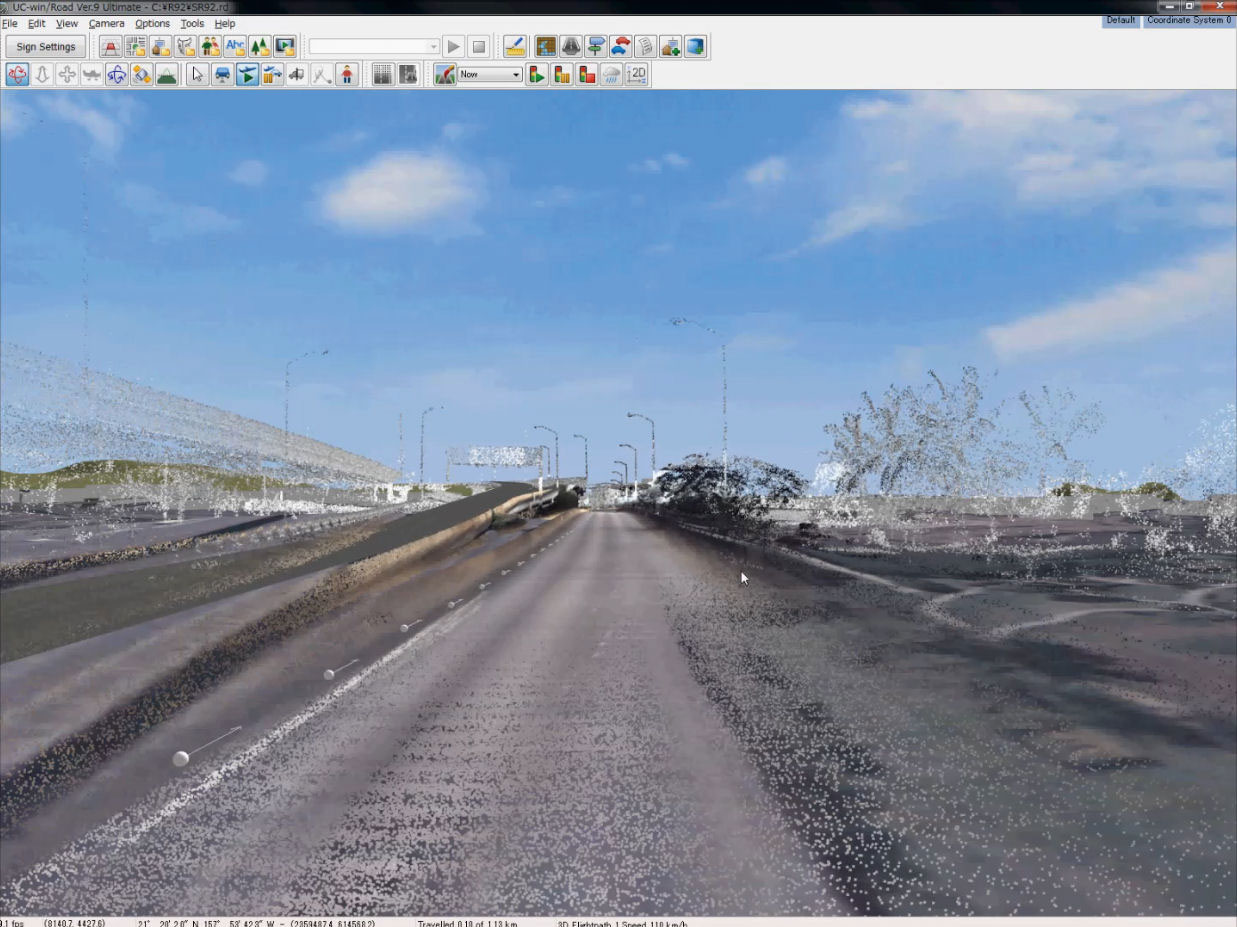
點雲在著色之後更加易懂,給高速公路路的管理提供很大幫助。夏威夷州運輸局今後也會在FORUM8的幫助之下,提高高速公路和構造物的維持管理技術。
 |
|
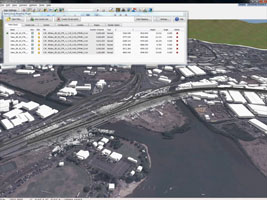 |
| 点云数据和照片的计测摄影位置统和示意图 |
|
在UC-win/Road中读取点云数据
和照片数据 |
| |
|
|
 |
|
 |
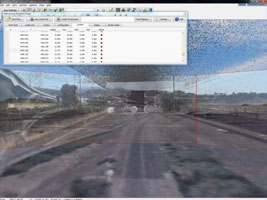
照片数据和点云数据的计测位置统和
|
|
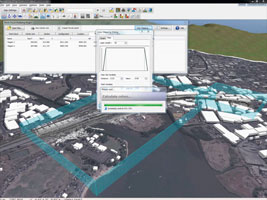
在点云数据中进行着色的演算
作业 |
| |
|
|
 |
|
 |
| 有色点云数据当中进行驾驶模拟 |
|
点云数据和照片在UC-win/Road
当中进行统和
夏威夷州高速公路调查工程师(右侧) |
|