|
|||||||||||||||
|
|
||||||||||||||




|
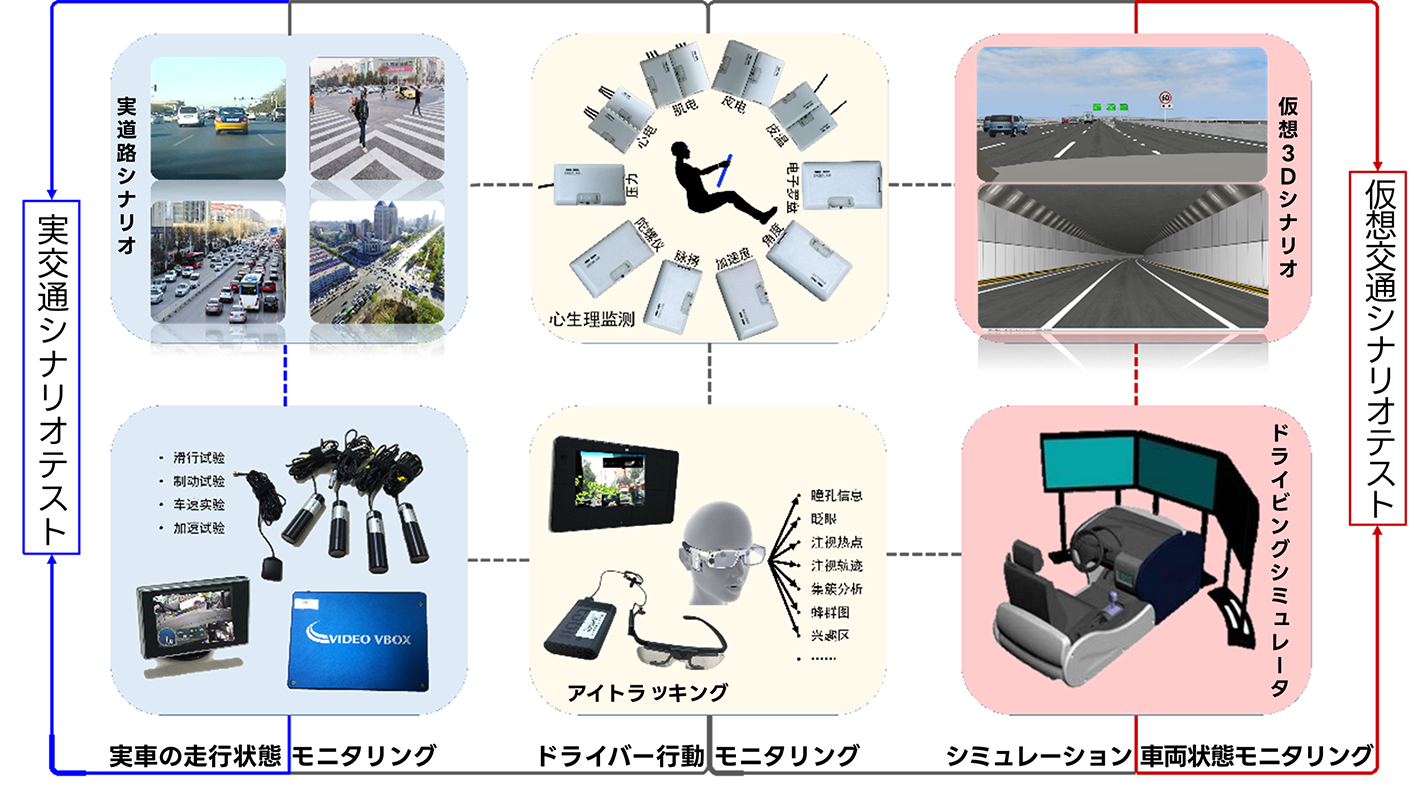
The Opportunity and Purpose for Introducing the UC-win/Road System As the research deepened, the team accumulated a solid hardware foundation and data collection capabilities in driver behavior monitoring and vehicle real-road testing, gradually building the prototype of a traffic behavior and safety research platform. During this process, a core challenge emerged: how to deeply integrate and experiment with real driving behavior data, vehicle operational data, and a complex, highly reproducible, high-fidelity traffic environment with high degrees of freedom? Whether exploring the mechanisms of driver physiological and visual characteristics, assessing the safety of road alignment and traffic facilities, or conducting human factors verification for future intelligent driving systems, a virtual testing ground capable of precisely simulating reality and allowing for editing of reality (e.g., changing weather, adjusting traffic signals, setting up unexpected events) was needed. At that time, the platform construction was at a critical stage. What the research team needed was not merely a 3D visualization tool for demonstration, but a simulation core capable of deeply participating in the scientific research workflow. It had to possess: high precision and flexibility, strong compatibility and extensibility, and comprehensive driving simulation support capabilities. After rigorous evaluation of multiple domestic and international simulation software packages, the UC-win/Road system stood out due to its excellent 3D modeling capabilities, mature vehicle dynamics simulation support, good interoperability with various engineering software, and most crucially, comprehensive and open APIs (Application Programming Interfaces). It met the technical requirements for building a complete, closed-loop research platform encompassing scenario construction, behavior collection, and data analysis.
Introduced UC-win/Road Driving Simulator to Educational Curriculum UC-win/Road upgrades traditional "armchair strategist" teaching to immersive experiential and inquiry-based learning, significantly improving teaching quality. Reshaping Practical Components of Core Courses "Traffic Safety Theory and Technology" Graduation Projects / Comprehensive Course Projects
VR Applications in Safe Driving Research and Advanced Traffic Control System Research Research on Identification and Safety Impact Mechanism of Driving Distraction Behavior under Multimodal Information Interference Human Factors Reliability Testing for Takeover Scenarios in Automated Driving
Applications and Future Prospects of Experiments and Research Using VR Looking ahead, the Traffic Behavior and Safety Research Team at North China University of Technology has high expectations for the cooperation with FORUM8 and UC-win/Road and has planned a clear blueprint for deepening its application: Deep System Integration and Upgrades Expanding Research Application Scenarios Research projects using UC-win/Road in Traffic Behavior and Safety Research Laboratory [1] National Key Research and Development Program of China: Research on Driving Behavior Analysis Technology for Assisted Driving Vehicles Based on Multi-Source Data, 2023-2026 [2] National Key Research and Development Program of China: Heterogeneous Entity Multi-dimensional Interoperability Technology Architecture and Verification Platform Technology, 2022-2025 [3] Project supported by the National Natural Science Foundation of China: Causal Mechanisms and Risk Assessment of Traffic Accidents Based on the Mind-Body-Field Theory, 2016-2018 [4] Beijing Municipal Education Commission Science & Technology Planned General Project: Research on Driver Interaction Characteristics and Accident Risk Early Warning Methods Under Multiple Conflict Types, 2023-2025 [5] Key Project of the Open Fund, Engineering Research Center for Road Disaster Prevention and Traffic Safety, Ministry of Education: Recognition and Modeling of Intersection Driving Intentions Based on Driver Perception, 2022-2024 [6] Beijing Municipal Outstanding Talent Training Program: Cognitive Driving Behavior Patterns and Risk Assessment at Signalized Intersections Based on Visual Characteristics, 2015-2016 |


| (Up&Coming '26 New Year issue) |
|
|||
|
|||


