

Vol.45
Academy Users Report
アカデミーユーザー紹介/第45回
奈良先端科学技術大学院大学
先端科学技術研究科 情報科学領域
ヒューマンロボティクス研究室
人間と機械の運動知能を理解し人間にとって使いやすい機械システムの実現へ
十数年来の利用踏まえ、運転支援や自動運転関連の研究にUC-win/Road導入

奈良先端科学技術大学院大学 先端科学技術研究科
情報科学領域 ヒューマンロボティクス研究室
所在地 奈良県生駒市
研究開発内容:ロボティクス、ヒューマンモデリング、人間機械システムおよびモビリティビークル
「(所属する)情報科学領域としては、コンピュータのハードウェア、ソフトウェア、ネットワークやセキュリティといった情報通信技術(ICT)そのものを研究しているところもあるのですが、私たちはどちらかというと、その応用側です」
「ロボットを動かす」とか「人間のことを理解する」といった取り組みの中では、コンピュータ自体のみを扱っているわけではない。そこでは、研究分野や研究テーマに合わせて必要であればICTを積極的に利用するし、そうでないところでは別に利用しないことも。例えば、AI(人工知能)を使ってロボットを賢くする研究がある一方で、微小重力状態で人間の知覚がどのように変化するかを調べる研究もある、と奈良先端科学技術大学院大学(NAIST)先端科学技術研究科情報科学領域の和田隆広教授は自身らの研究アプローチにおけるICTをこう位置付けます。
そのような観点から、AIを始め新しいICTのツールが次々登場してくる中で、それらの有効活用に理解を示しつつ、和田教授は「ひとが作ったプログラムを回すだけで精いっぱい」なケースも窺われる現状を懸念。プログラム内のロジックを分かったうえで使えるよう、しっかり時間をかけて勉強することの重要性を説きます。
同教授がフォーラムエイトの3DリアルタイムVRソフトウェア「UC-win/Road」を初めて利用したのは、香川大学在職中の2008年頃。その後、立命館大学を経て現行の奈良先端大に異動した2021年、筑波大学との共同研究を機に自身が主導する「ヒューマンロボティクス研究室」として改めてUC-win/Roadを導入。デジタルツインの実験環境を構築し、UC-win/Roadのシナリオ機能を活用して、運転支援や自動運転のシミュレーション条件を柔軟に設定しながら、研究・開発を進めています。

和田隆広教授
最先端の科学技術分野に特化した大学院大学
奈良先端大は奈良県生駒市に1991年、学部を置かない国立の大学院大学として創設。最先端の科学技術分野における研究を進め、その成果を基盤とした高度な教育による人材育成を通じ、科学技術の進歩と社会の発展に寄与することを目的に掲げます。
奈良先端大は現在、先端科学技術研究科として情報科学、バイオサイエンスおよび物質創成科学の3領域を設置。修士・博士課程を合わせて1,200人超の学生に対し、200人超の教員、有期契約職員等を含めると600人超の教職員を擁します(数字は2025年5月現在)。
そのうち和田教授が所属する情報科学領域は、2024年9月にそれまでのコンピュータ科学、メディア情報学およびシステム情報学の3分野を再編。新たにAI基盤情報学およびAI応用情報学の2学問分野により構成。前者はAIを支えるコンピュータのハードウェア・ソフトウェア、ネットワークおよびセキュリティなどの基盤技術を、後者は自然言語処理、画像処理、機械学習といったAI、およびその幅広い応用技術をカバーしています。
“ヒューマン”を冠したロボット系研究室の取り組み
今回ご紹介する「ヒューマンロボティクス研究室」はAI応用情報学分野に属し、人間にとって使いやすく快適な機械システムの実現を目指す、とのターゲットを設定。システム論や機械学習などのICTを活用し、人間の感覚や運動制御特性を理解した上で、それに基づく機械システムの知能化に関する研究を実施。具体的には、1)リハビリテーションロボットや義足、あるいは自動車や建機などの操縦型機械における快適性や操作性の向上(人間と機械の運動知能の理解)、2)機械の使用による人間の能力拡張時に動揺病(乗り物酔いやVR酔い)などから作業性能の低下を招かないための、人間と機械の適合性の追求(機械による人間の身体機能拡張時における人間の機能変化の理解)にフォーカス。それらの成果を人間機械系の設計手法に応用する幅広い研究を行っています。
「ロボット系ではあるのですが、研究室の名前になぜ“ヒューマン”と付いているのか」。和田教授はその理由として、「人間と機械の運動知能の両方を理解した上で、ロボット制御理論やヒューマンロボットインタラクションに活用する」研究室のアプローチを挙げます。
こうした狙いに基づき同研究室では、1)ロボティクス(機械を賢くする研究:ロボットマニピュレーション、水中ロボット、ソフトロボティクスなど)、2)ヒューマンモデリング(人間を理解する研究:人の運動制御や動揺病などのモデリング)、および3)人間機械システム(ロボティクスとヒューマンモデリングの統合:ヒューマンロボットインタラクションなど)―の3つを研究の柱に位置付け。さらにそれらの実際的な応用分野として4)モビリティビークル(自動運転車や運転支援技術など)の研究にも力を入れています。
同研究室は2025年度、和田教授を中心に客員教授1名を含む教員5名、博士課程6名・修士課程14名の学生、そのほか国内外の複数インターンシップ生が在席しています。
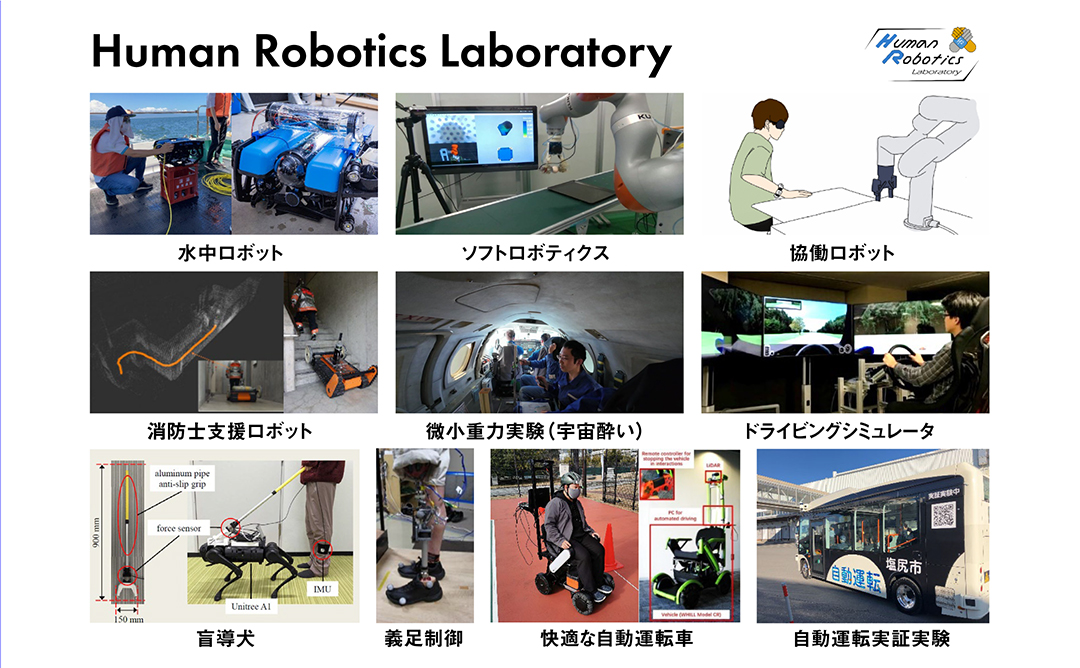
人間と機械の運動知能を理解し、ロボット制御理論やヒューマンロボットインタラクションに活用している
自動運転、運転支援の研究開発にUC-win/Road活用
和田教授が香川大学に准教授として在籍していた当時、ソフト・ハードともに学生が手作りした、実車を半分に切った形のシミュレータが研究では専ら使われていました。それで「何か導入しやすいシミュレータはないか」と探していた2008年頃、UC-win/Roadを知る機会に遭遇。その際に魅力だったのが「シナリオが割と簡単に作れ、しかも拡張性があり、プログラミングさえ出来ればお金をかけずに何でも自由に作成可能なこと」で、早速最初の導入に至ったと振り返ります。
その後、立命館大学教授などを経て2021年に現職に就任。当時、伊藤誠・筑波大学教授を研究代表者とする科学研究費助成事業(科研費)「障害者運転のリスクマネジメント:緑内障を例とした攻めと守りの支援デザイン」が動き出した頃で、そこに和田教授も研究分担者として参加。視野に制限のあるドライバーに対する運転支援の在り方を研究するため分かりやすい運転環境をすぐに作れるシミュレータが求められました。そこで香川大時代の利用実績もあり、ヒューマンロボティクス研究室としてのUC-win/Road導入に繋がります。
以来、同研究室では1)和田教授が立命館大時代から継続的に取り組んできた、自動運転からの運転引継ぎを安全に行うためハンドルの反力を徐々に軽減する研究、2)前述の緑内障による視野障害者の運転支援と、それに続く視野障害者向け実践的な運転支援の研究、および3)自動運転からの運転引継ぎ時における周辺交通参加者向けeHMI(external Human-Machine Interface)利用の研究にUC-win/Roadが活用されてきています。
運転引継ぎ時のリスク回避狙い開発した外向けeHMIをDSで再現
「今はUC-win/Roadドライブ・シミュレータ(DS)を用い、自動運転(レベル3)から手動運転への運転引継ぎ時の、周りの道路利用者向け情報伝達について研究しています」
同研究室で電動モビリティビークルと歩行者のインタラクションなどの研究を行ってきた劉海龍(Hailong Liu)准教授は、この3面ディスプレイ・6軸モーション付きDSを利用した直近の取り組みに言及します。
高速道路を自動走行中のクルマで運転引継ぎ要請(TOR)が出たらドライバーは早めに手動運転に対応する必要がある。実はその運転操作を引き継いだ直後はリスクを生じやすい。そこで同研究室では、歩行者向けの類似研究が多い中、一般財団法人日本自動車研究所(JARI)と共同で、運転引継ぎ時に周辺を走行中の他車向け情報伝達手法(外向けeHMI)を考案。自動運転車の後部にオレンジ色と緑色の2つのLEDバーを設置し、UC-win/Roadのシナリオ編集機能を活用して、自動運転システム作動中は緑、TORが出るとオレンジが点滅し始めドライバーが正しく介入(手動モードに切り替わり)するとすべて消灯するという動作を再現しています。2023年に当該研究に着手。翌24年に上記装置を搭載した自動運転車両が高速道路上を走行し、後続車両が一連の流れを体験するDSを開発。併せて、これを用いた実験の成果を発表しています。

UC-win/Roadのシナリオ機能で目の前で事故が発生する場面を再現。事故発生直後に自動運転から運転操作を引き継ぎ、周囲の状況を確認しながら適切な判断を行う
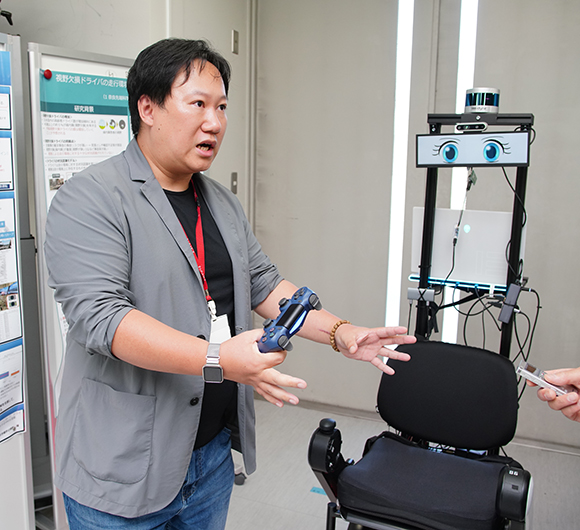
自律型個人移動車両のeHMI設計が乗客体験に与える影響を調べ、音声など複数手段のeHMIが理解と快適性を高めたという研究結果を紹介する、劉海龍(Hailong Liu)准教授
自動運転中の快適性研究で求められる高度な乗り物酔いシミュレーション
「クルマの走行環境を手軽に、それなりのレベルのものを作ることが出来る。しかもシナリオが作りやすい、というところにUC-win/Roadの魅力を感じています」
その意味では、UC-win/Roadの機能は概ね導入時に期待した通り、と評価。一方で近年、シミュレータ自体が目的に応じて多様化し、研究者にとっての選択肢も次第に拡充。以前であれば単に「皆でUC-win/Roadを身に付けましょう」といっていれば済んだのが、最近は複数の選択肢を保有しておき、学生らがそれぞれの用途やテーマにより使い分けるといった手法を採るケースが増えてきている、と和田教授は述べます。
その背景にあるのが、オープンソースのコミュニティを通じて流通する情報の充実で、そうしたニーズも視野にUC-win/Roadでは、学生らが精通するPythonなどのプログラミング言語との連携に加え、各種プラグインを活用した外部データや都市環境情報の取り込みにも対応しています。道路形状、交通信号、建物、樹木などのデータを組み込んで、リアルなシミュレーション環境を短時間で構築できることに加えて、作成したデジタルツイン道路環境や3Dモデルをエクスポートして他のシステムとの容易な連携にも対応。初版リリース以来25年にわたる問い合わせ履歴を学習したチャットAIを活用したサポート機能の構築も進行中で、学生が柔軟にUC-win/Roadを活用できる環境が整っています。
同研究室では、Simulink連携プラグインオプションを活用し、外部制御モデルと接続してシミュレーションを制御する取り組みも行っており、和田教授は、UC-win/Roadで作成する道路環境をオープンソースのシミュレータにエクスポートするなどの新たな活用可能性に注目しているといいます。
「乗り物酔いとか、乗車中にパソコンやスマホを見ながらの仕事(サブタスク)が酔いの影響もあって出来なくなる、といった問題について以前から研究してきました」
その成果の一端として、酔いのメカニズムが次第に明らかになってくる中で、「どれくらい酔っているか」を推定できるモデルも構築。今後はそれらを使い、「自動運転中に仕事をしたり、動画を見て楽しんだりしていても酔わない」ような、車内空間の快適性について更なる研究を進めていきたい考えを提示。さらに、この乗り物酔いモデルを活用することで、シミュレータ酔いを定量化することが可能となり、酔いにくいシミュレータの開発への応用にもつながる(和田教授)といいます。また、UC-win/Roadの柔軟なシナリオ設定により、実験条件の変更や繰り返し検証も効率的に行うことが可能です。
「乗り物酔いのシミュレーションでは体の動きと目からの情報がとても大切なのです。被験者にどんな情報を見せるかで酔いが結構変わってくるため、その時に使えるようなものが求められます」
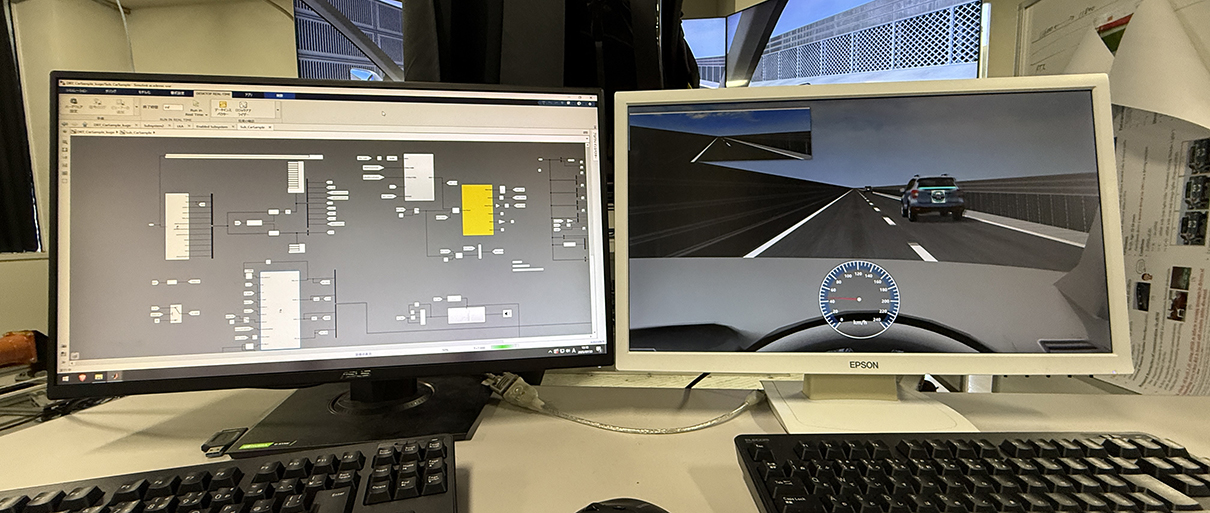
Simulinkとの連携環境を活用してシミュレーションを制御(UC-win/Road(Simulink連携プラグインオプション)を利用)
(Up&Coming '25 秋の号掲載)


