|
||||||||||||||||||
|
在有着超过140年历史的北海道大学中,研究室的地位 今年可以说是比往年下雪要少了,在JR札幌站的周边街道两侧的积雪感觉会持续到三月上旬。我在这时去拜访了札幌站附近的北海道札幌校区 的尖端机动工学(萩原)研究室的萩原教授。 |
|||||||||||||||||




以1876年建立的札幌农学校为起源的北海道大学,历经140多年,在学校中设立了文学、法学、理学、牙科、工学、兽医学、教育学、经济学、 医学、药学、农学、水产12个本科生院以及3个研究科、14个研究院、17个学院、1个教育部、一个合作研究部。本科生和研究者总人数超过了 一万八千人(各个数据都采集于2018年4月现在),分别在札幌和函馆两个校区进行着教育和研究。 这其中,萩原研究室所属的工学研究院涵盖了应用物理、应用化学、材料科学、机械宇宙工学、人类机械系统设计、能源环境系统、量子理工学、环境 领域工学,北方圈环境政策工学、建筑城市空间设计、空间性能系统、环境创生工学、环境循环系统,共13个部门37个专业。其中北方圈环境政策 公学部门还分寒冷地区建设工学和技术环境政策学两个领域,萩原研究则属于后者。 从着眼于司机行为,到马上就要展开自 动驾驶 萩原研究室是以司机的行为,尤其是关于其目标确认性的研究为基础,跨越了交通计划到交通工学、社会安全系统科学、土木工程等领域来进行 研究开发从而支援社会。这也与他们想要通过各种各样的视角来防止交通事故发生的想法不谋而合。 萩原教授着眼于司机行为这件事可以追溯到30年前教授的写的关于司机行为的视点的论文。在那之后,教授的研究就变成了“司机在看什么, 想什么,采取什么样的行动会有什么样的结果”。其中“因为司机失误而造成的交通事故”这个研究问题尤其吸引教授注意。教授为了让司机不出 现失误,一直在努力进行对策和技术的研究开发。据教授所说,近些年他一边提高车辆本身的性能,一边将重点从控制车的司机身上转移到了控制 车的机器身上。 “这就是现在最大的变化吧,现在就变成了这样全新的研究(在开头已提到过)。” 大概五年前开始把自动驾驶作为研究对象。在那之后,就进一步把自动驾驶作为主要研究方向了,不过也不是总会研究自动驾驶系统这一个方 面,我还会以修道路的基础设施的一方的视角来考虑着“什么事情是非做不可的”,从而找到和司机行为的关系。 如果说萩原教授致力的事业的话,就是之前所说的萩原教授应聘并获得补助的两个研究。 一个是、以交通事故解决方案为政策领域的《城市街道间Pro-bean照明的研究开发》(研究代表人:萩原教授、研究期间:2016年 -2018年三年)。这是一个防止在晚上出现横穿马路行人的事故,着眼于如何使司机今早发现行人的研究。在这个研究里,我们开发出了通过 协调行人头灯和车辆前进方向的灯光来使得司机今早发现行人的“Pro-Beam”。 另一个则是对应特定课题(关于自动驾驶社会实现的必要基础设施)的《灵活运用自动驾驶与车站来支撑生产创造新的道路的相关开发研究》 (研究代表:有村干治/室兰工业大学副教授、研究时期2017-2019的三年)。由于人口减少而很难维持公共交通设施和物流,因此北海 道农业水产业和观光业共同注意并正在研究的“生产空 间”问题。旨在研究道路交通环境以及包括自动驾驶和活用路上车站的道路交通政策的理 想状态。 萩原教授在参加该计划的时候,选择了使用UC-win/Road DS。 另外,萩原教授还在不上课的时候,和国土交通省北海开发局、NEXCO东日本・中日本・西日本,NEXCO总研究中心,本四告诉等各家 公司联手开发。比如,他们考虑到司机视力确认性的问题,从而一起开发研究在什么样的道路上照明,以及隧道照明是不是在晚上容易看到的问 题。
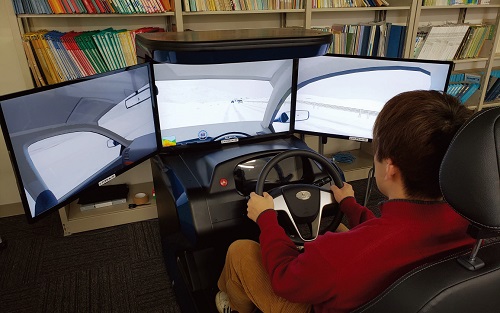
为了研究在冬季使用ACC功能的驾驶员行为,决定使用UC-win/Road驾驶模拟器
从五年前开始,萩原教授就着手研究自动驾驶,同样也是五年前也接近让驾驶员在田野上进行观测的行动。但是与此相对的是,从2017年开 始的,通过国土交通省道路局补助才得以实现的,自动驾驶与活动站台来支持生产空间的新的道路交通政策的研发是以使用VR技术为前提条件 的。萩原教授着眼的地方有两点,第一、在实际生活中在田野上开车并不能每次都可以有相同的条件背景,而通过VR技术就很有可能把实验条件 和重复自动驾驶保持在很高的相似度上。第二即使是VR上发生冲突的情况也不会伴随真正的危险。
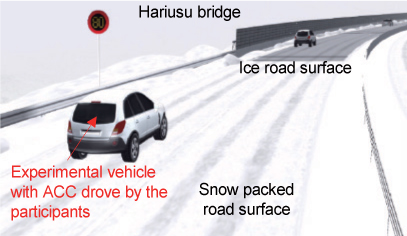
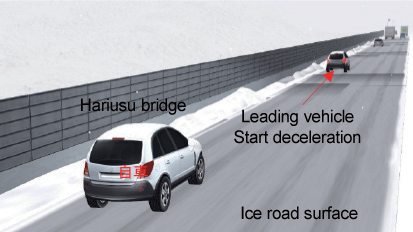
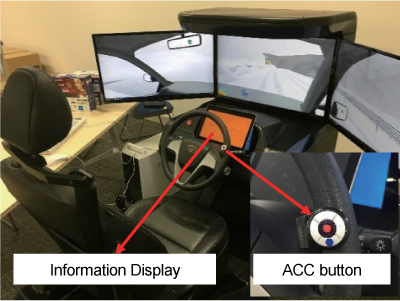
萩原教授首先把在冬季的道路条件下路况和自动驾驶系统相关联,把道路方设定为“当出现自动驾驶系统的传感系统检测不出来的前方路面状 况、视野状况等有风险的情况时,会通知自动驾驶系统。”同时,此研究还在观察冬季高速路上使用自适应巡航控制电源(ACC)的驾驶员在前 方容易发生打滑的路面上(低μ路)为了放置发生危险而产生的提前规避的行为,并对此提供相应信息。因此也就测算了1)驾驶员已知前方是低 μ路后的驾驶情况和2)驾驶员知道前方是低μ路以及应对方法的驾驶情况的差异性。因为在实际道路上我们很难再现上述两种情况,因此我们使 用了DS来完成实验。 在研究三年期间的第一年(2017年)。北海道大学有46人参加上述实验。在旁边处理其他计划的场区实验中,由于不管道路的光滑度而给道路曲 线结果造成了很大的影响。因此,接下来的第二年就比前一年多少改变了场合,加入了道路线性的要素,也同样有32名学生参加了该实验。
关于研究最后一年的打算和今后对VR的使用 在这次实验中使用的VR通过同一个研究室中的UC-win/Road做出来了一个可以充当实验环境的地形数据。 萩原教授说道,Forum8那边稍微加了一点脚本,补足了UC-win/Road中的不足,准备了我们要求的软件,而且还有随时的售后 服务和技术支 援。在这个基础上我们大学方面才最终将设备调整到了最终状态。通过这样的程序,我们对UC-win/Road的评价是“方 便的地方有很多”,同时在做实验的时候也真切地感到了这一点。在这个基础上,在最后一年(2019年)我们将要一点点的改变自动驾驶系 统,并且考虑反复使用VR做和去年同样的实验。 在这次的研究中,为了理解自动驾驶和驾驶员的互相干涉,我们使用了VR技术。以此为基础,我们想要在将来开发出更好的自动驾驶界面,创 造让驾驶员不出错我的道路。 |
||||||||||||||||||||||||||||||
| 作者:池野隆 (Up&Coming '19 春季刊) |
||||||||||||||||||||||||||||||

|
||||

