The scenario function of UC-win/Road Ver.9 has become more intelligent than that of previous version. One of the improvements concern the dynamically controllable parameter mentioned in the following paragraph.
First, the speed at which each of the surrounding vehicle is traveling, the lane number of the lane on which each vehicle is traveling and its offset distance inboard from each of the lane delimiters can be now changed. In addition, the system can create a control command that triggers a specific event at a specific time and place within a scenario based on the information of the vehicle-in-front from your vehicle’s perspective. Furthermore, your vehicle’s parameters concerning ACC feature can now be changed. The same type of parameters that can be assigned to other vehicles can now be assigned to your vehicle as well.
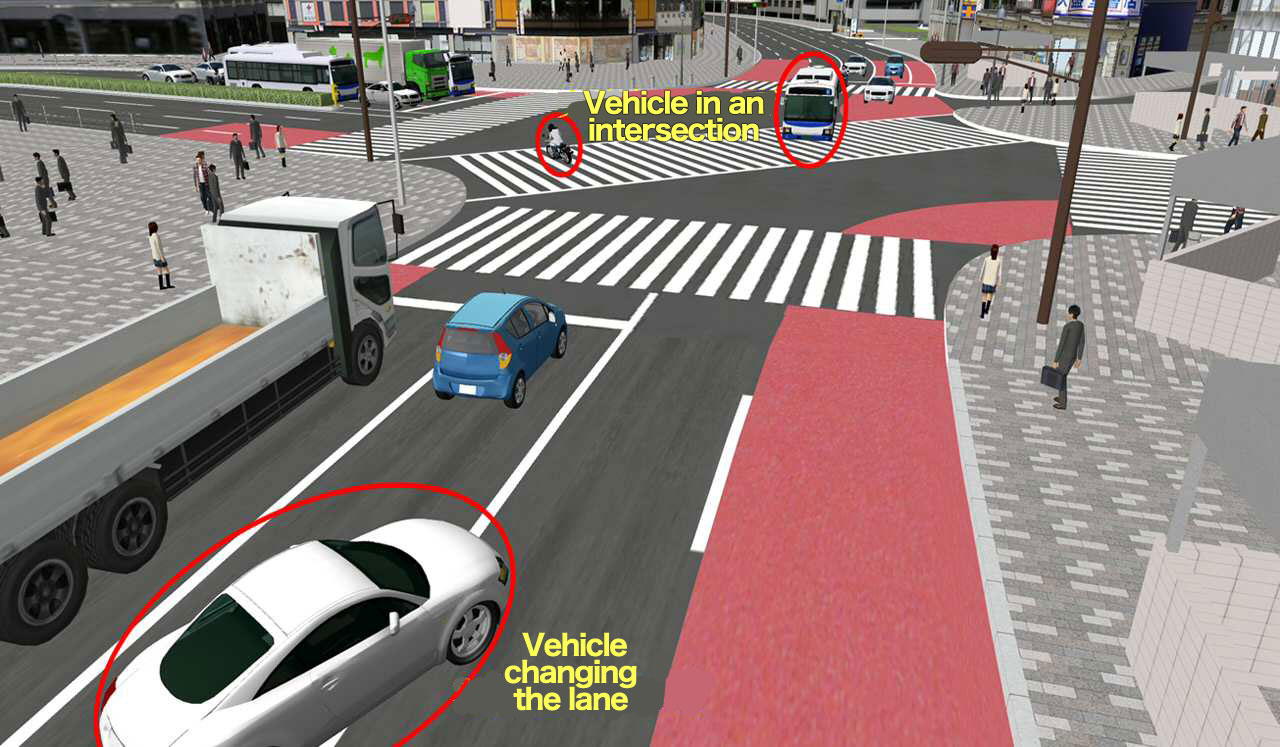
Moreover, it is now possible to assign information of the vehicle in front as a condition that triggers a specific event within a scenario. This means that you can assign the information of the vehicle-in-front relative to your vehicle (such as how far ahead the vehicle-in-front is) as a condition that determines the next event within the scenario at a specific time and place. This mechanism is in line with the control command explained earlier. For example, the distance between your vehicle and the one in front and time to collision can be used as a reference for controlling the transition of the scenario. These commands can be used to reproduce various driving conditions. One of the many things that you can do using this feature is creating a scene in which the other vehicle cuts in front of you by creating a command that makes the other car change lanes according to the distance between your vehicle and the one in the right turn-only lane, or make the vehicle-in-front move more or less laterally by changing its offset distance inboard from each of the lane delimiters.
Another amazing thing about Ver.9 is its ability to control pedestrian simulation in that it is now possible to select pedestrian model and to assign a point from where the pedestrian starts walking and a point at which it stops.
Traffic snapshot function
Feature that takes a snap shot of a traffic condition has been added to make traffic simulation more versatile. In the previous version, a simulation recorded by the taking advantage of the Replay plug-in or Microsimulation Player can be played. The traffic snapshot feature has been built on top of this feature, allowing you to start a simulation under a specific traffic condition. The new feature comes in handy when you want to resume a simulation under a saved traffic condition in which there are many vehicles. Since the driving condition of your vehicle is saved as well, you can start driving as the simulation starts i.e. drive within a predefined simulation.
 |
 |
|
| Figure 1 A scene where a vehicle cuts in front of you because there were enough space. |
Figure 2 After resuming a simulation from a saved traffic condition (traffic snap shot) |
ACC/Autonomous driving feature
The ability to reproduce behavior of the driving vehicle equipped with ACC and to reproduce autonomous driving within a simulation has been added. These functions can be applied in research and education on ITS and traffic safety.
An algorithm unique to ACC based on autonomous driving feature equipped on each and every vehicle within a traffic simulation in UC-win/Road has been developed. Thanks to this development, it is now possible for vehicles to keep within a specific traveling speed and time to collision, and for vehicles to switch from manual driving to autonomous driving and vice versa. Furthermore, by running vehicle-infrastructure cooperative simulation, vehicles can recognize traffic signals and speed limit.