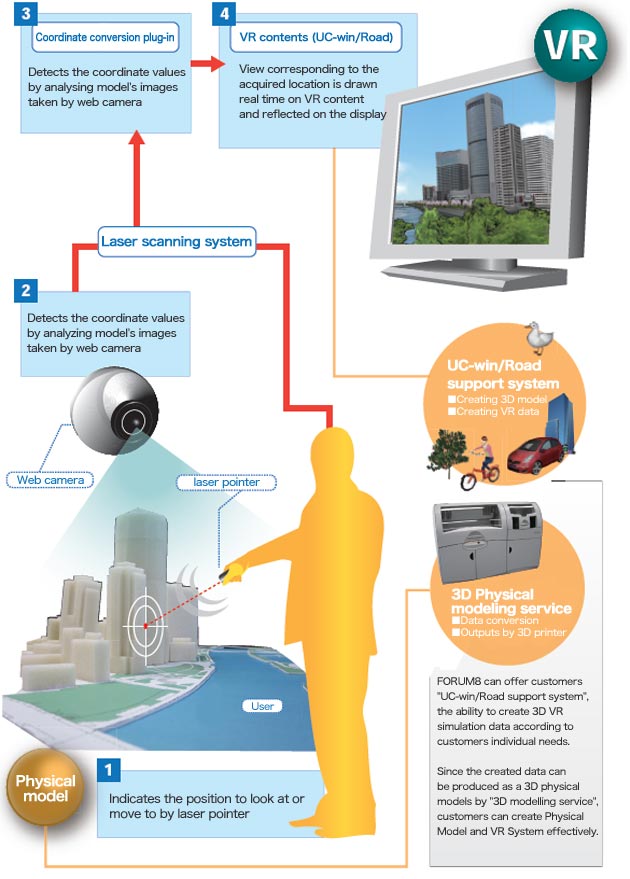
In "UC-win/Road Physical Model and VR System", you can move in
the VR space and make changes in the view direction by indicating the view
points to examine with laser pointer on the model.
The system consists of model, web camera, laser pointer, VR software "UC-win/Road",
and display unit to view the VR display space. As a whole, the system consists
of two functions: detecting laser pointer operation, passing detected information
to UC-win/Road and representing it in VR space.
FORUM8 is ready to estimate and quote "UC-win/Road Physical Model
and VR System" upon your request. We look forward to hearing from
you.
 |
| Detecting laser pointer operation |
: |
|
~ |
|
|
|
|
| Reflecting information in VR space |
: |
|
|
|
|
|
Processes images taken by web camera installed above the model, and detects
the coordinate of the position indicated by laser pointer based on a "marker"
on the model. Then, synchronizes the position on the model with the position
on the VR model by converting detected coordinate values to coordinate
system in VR.
(ARToolkit (*) is used as a library of infrastructure software to define
the coordinate system of the model.) |
|
By using UC-win/Road plug-in developed by UC-win/Road SDK, import obtained
VR coordinates by to UC-win/Road and present corresponding landscape in
the views in VR. |
|

