
| 3D Real-time VR Software |
We are pleased to announce to the release of the motion platform option for driving simulation at the end of April, 2009. Let us introduce of basic information about reproduction of virtual driving, especially about the motion platform.
It is nothing to say that when you carry out a driving simulation by Virtual Reality (VR), the closer driver's sense approaches to the reality, the more accurate simulation results can be acquired. As a human have five senses: Sight, Hearing, Taste, Smell and Touch, reflecting all of senses including Balance to the simulation is not easy at all. The most important sense is Sight in driving, which is reproduced by 3D VR simulation. As for the Hearing, sound system can be done. Not using Taste and Smell, drivers need Balance to capture a vehicle motion. Now, the cutting-edge technology, Motion Plat Form have been established to allow drivers communicate The Motion Plat Form is not so important when you aim to the simple training, in which vehicle motion don't change widely.
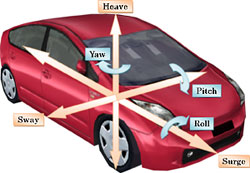
To reproduce drivers' awareness for movements, it's necessary to trick human senses. The balance can be integrated from some information sources. A 3D accelerator can be sensed with semicircular canals (anterior / posterior / lateral semicircular canal) and horizontal and vertical accelerator can be done with an otolith (utricle and saccule). This was just capture 3D movement, so 3D movement has to be reproduced by the Motion Plat Form. To support these movement including rotation and straight movement completely, 6 degrees of freedom (6DOF): 2 times 3 axes is 6 DOF, is needed. But, because the Motion Plat Form work in a more limited space than realistic vehicle space, it's impossible to reproduce real vehicle motion. It primarily detects acceleration, not capturing by the amount of movement or speed. Thus the Motion Plat Form is created to reproduce the acceleration and controlled. As the way of reproducing the motion, following technologies are used. General 6 DOF hardware configurations are combined with multiple actuators under a cockpit. With this configuration, the cockpit moves and rotates from the center point to all directions. The maximum lengths of the movement from the center point equals to the limit of motion, so continuous and long-time movements are impossible.
 |
 |
|
Three measurements are adopted for this limitation.
- Reproduce the high frequency acceleration of vehicle primarily
- To reproduce the next acceleration, the cockpit moves back to the center with the speed which drivers can't realize.
- Reproduce the horizontal acceleration by gravity, when you lean the cockpit
Above these ways, Surge and Sway can be reproduced with the Motion Platform of 3DOF.
Also, rotating the cockpit horizontally with Yaw table reproduce the realistic feeling when you make the curve.
UC-win/Road allows you to link with the Motion Platform, a hardware OEMed by INNOSIMULATION, Inc as an option of the UC-win/Road Drive Simulation. To realize to link with the one, it was needed to improve software. To reproduce a high performance motion, we adopted vehicle motion model of INNOSIMULATION, Inc and the Washout filer which control platform behavior. a vehicle motion model with CarSim by Mechanical Simulation Corporation is also available. To prevent discontinuous motion of platform, the location of platform is controlled with over the rate of 100Hz. Calculation of vehicle motion and control of platform can reproduce continuous motion.
 |
In addition, for the safety of hardware and user, four layers safety system is configured.
- Filter not to exceed the movable range and the safety acceleration for the command signal of platform outputted from UC-win/Road.
- Check the move command signal for the same purpose on the hardware device side whether the signal works well or not.
- Check the signal which is sent to actuator itself, and if actuator have problems, actuator's motion can be forced to stop.
- Emergency stop button is available whenever you want to use it.
 |
 |
|||||||
|
| DOF | Displacement | Velocity | Acceleration |
| Roll | ±8° | >±60°/s | >±300°/s |
| Pitch | ±5° | >±60°/s | >±300°/s |
| Heave | ±50mm | >±200mm/sec | >0.5g |
| Launched Micro Simulation Player on April. This option allows you to visualize the simulation result outputted from other extra simulation software in OpenMicroSim format. It allows you to reproduce the simulation result of traffic analysis, evacuation analysis, 4D construct management application with VR environment of UC-win/Road. The OpenMicroSim is the open format FORUM8 develops and proposes. For more information, see the following website. http://www.openmicrosim.org |
