| Sản phẩm & dịch vụ mới | CG/VR | |||||||||
●Giá bánPhiên bản Ultimate: USD 17,200 Phiên bản Driving Sim: USD 11,000 Phiên bản Advanced: USD 8,800 Phiên bản Standard: USD 6,000 Phiên bản CIM Lite: USD 4,800 ●Phát hànhNgày 03 tháng 06 năm 2022 |
||||||||||
|
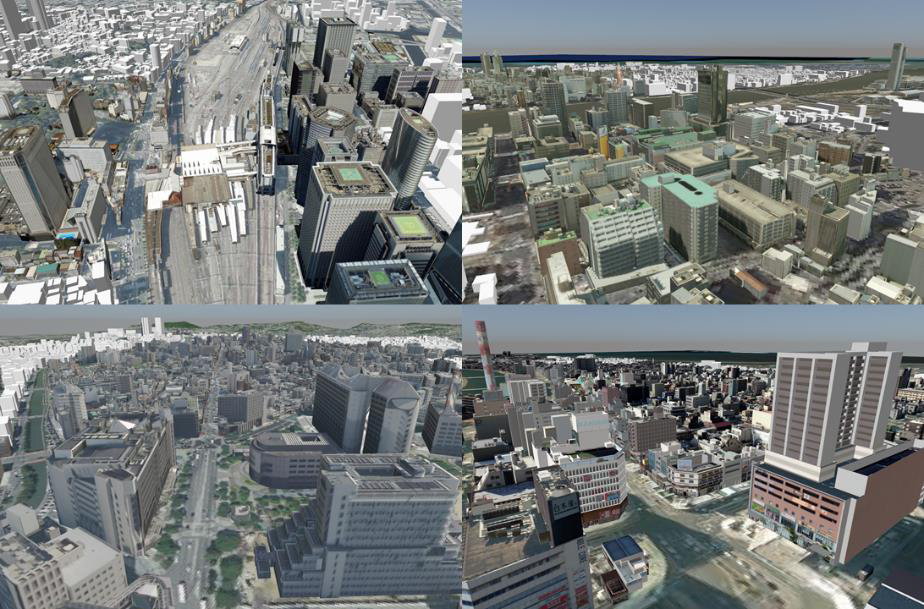
Thêm tính năng hỗ trợ CityGML và PLATEAU UC-win/Road Ver.16 đã được trang bị các chức năng mới cho phép import mô hình đô thị ở định dạng CityGML trong PLATEAU, nền tảng mở cung cấp dữ liệu mô hình đô thị 3D của Bộ Đất đai, Hạ tầng, Giao thông và Du lịch Nhật Bản (MLIT) vào không gian VR của UC-win/Road. Ở phiên bản trước người dùng vẫn có thể import dữ liệu mô hình thành phố định dạng FBX và OBJ, tuy nhiên phiên bản mới này hỗ trợ CityGML, cho phép người dùng import trực tiếp tất cả dữ liệu mô hình thành phố PLATEAU vào UC-win/Road.
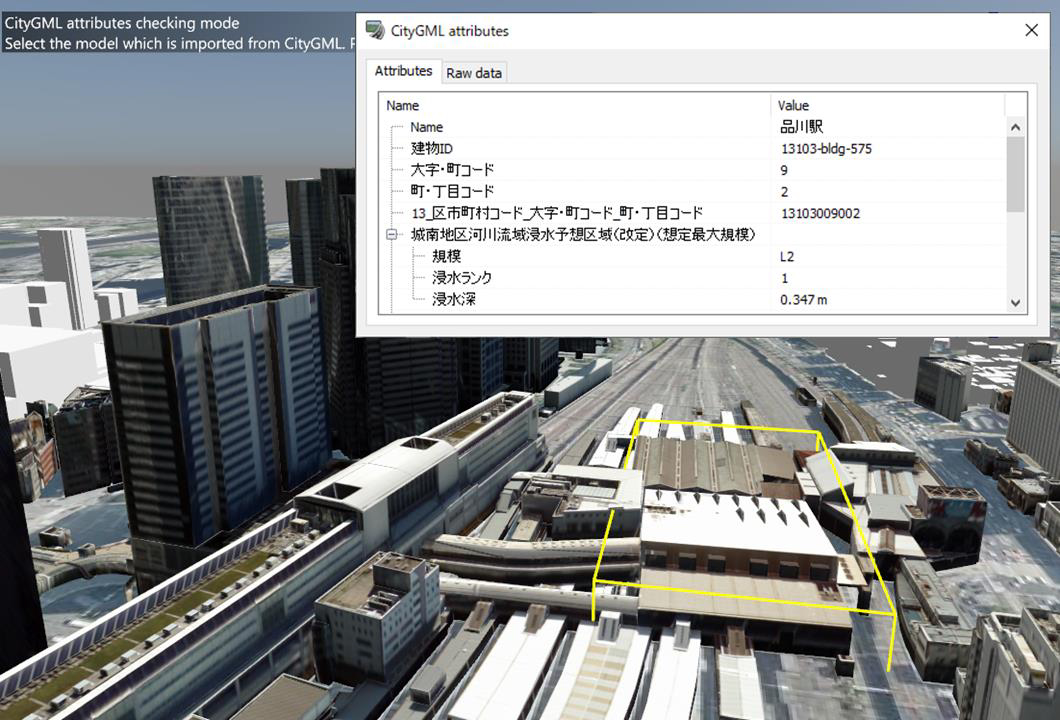
Ngoài ra, thông tin thuộc tính của mô hình tòa nhà được lưu trong file CityGML cũng được import vào cùng với mô hình trong UC-win/Road. Như vậy, dữ liệu thuộc tính lưu kèm mô hình đô thị từ PLATEAU có thể được import và xem trực tiếp trên UC-win/Road, điều mà trước đây chúng ta không thể làm được với mô hình định dạng FBX và OBJ. Có thể xem thông tin cơ bản của các mô hình công trình cũng như dự đoán về khả năng ngập do lũ lụt và sóng thần nếu có.
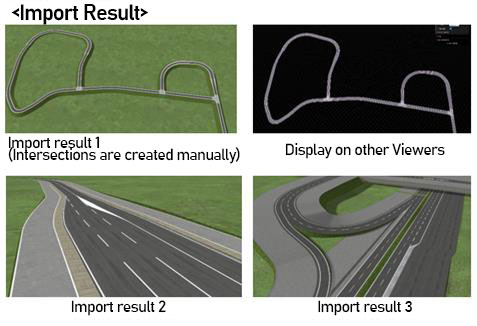
Trong thời gian tới, chúng tôi sẽ phát triển các tính năng liên kết với mô phỏng sử dụng dữ liệu hình dạng, thuộc tính của các file CityGML đã import để trực quan hóa các thuộc tính của mô hình, sau đó xuất ngược lại kết quả mô phỏng trong UC-win/Road sang định dạng CityGML. Qua đó, chúng tôi kỳ vọng UC-win/Road sẽ hỗ trợ vận hành bản sao số (digital twin) tốt hơn. ASAM OpenDRIVE OpenDRIVE® là tiêu chuẩn quốc tế về mạng lưới đường có độ chính xác cao hỗ trợ lái xe tự hành nâng cao do ASAM (Hiệp hội tiêu chuẩn hóa hệ thống đo lường và tự động hóa) thúc đẩy. UC-win/Road Ver.16 được trang bị tính năng import file ASAM OpenDRIVE®. Mục đích là để giảm chi phí tạo môi trường mô phỏng bằng cách import mạng lưới đường (đường, làn đường) được tạo bởi các phần mềm bên thứ 3 vào UC-win/Road thông qua OpenDRIVE®. Việc sử dụng bản đồ có độ chính xác cao là cần thiết trong quá trình phát triển, kiểm nghiệm tính năng ADAS và công nghệ tự hành trong những năm gần đây. FORUM8 sẽ phát triển tính năng export cho OpenDRIVE® và tính năng import bản đồ có độ chính xác cao, nhằm giúp UC-win/Road hữu dụng hơn trong quá trình phát triển, kiểm nghiệm công nghệ.
Thêm các tính năng về cụm máy đa người dùng (multi-user cluster) Người dùng có thể sử dụng chức năng cụm máy đa người dùng hiện có trên UC-win/Road để cài đặt, thay đổi các điều kiện chuyển tiếp (transition) của kịch bản (scenario) theo trạng thái của người dùng máy trạm. Ngoài ra, các sự kiện có thể được cài đặt để xảy ra không chỉ theo hành động của người dùng máy chủ (main user) mà còn cả của người dùng máy trạm (client user). Ví dụ: trong lĩnh vực nghiên cứu an toàn giao thông, phát triển ADAS (hệ thống hỗ trợ lái xe nâng cao) và công nghệ tự hành, khi xây dựng một hệ thống cụm máy mô phỏng việc lái xe của 2 tài xế và các phương tiện xung quanh, một tài xế có thể gửi tin nhắn hoặc gọi cho tài xế kia để thông báo về hành vi lái xe nguy hiểm của tài xế đó. Từ tab Scenario trên ribbon menu, có thể đăng ký người dùng trên cửa sổ chỉnh sửa đa người dùng (multi-user edit). Chúng ta cũng có thể lấy đối tượng người dùng đã được đăng ký làm điều kiện chuyển tiếp kịch bản (scenario transition) và mục tiêu sự kiện (event target). Cần chỉ định/ gán người dùng cho từng máy trên cửa sổ Cluster master. Các tính năng khác Phiên bản mới được trang bị thêm các tính năng sau: - Thông số phản xạ gương (shininess) của mô hình cho phép điều chỉnh phản chiếu của môi trường lên vật thể (environment mapping) - Nhập/ xuất dữ liệu mặt cắt đường định dạng CSV: Ngoài định dạng RS được hỗ trợ trước đó, người dùng hiện đã có thể import/ export file dữ liệu trắc ngang/ trắc dọc định dạng CSV. - Mở rộng màn hình chỉnh sửa các đối tượng bên đường giúp cập nhật hàng loạt kết cấu và dữ liệu mô hình, đồng thời giúp sắp xếp và tìm kiếm dữ liệu trong danh sách dễ dàng hơn. - Có thể cài đặt chuyển tiếp mượt mà giữa các hiện tượng thời tiết như mưa, tuyết, gió. - Có thể xuất dữ liệu nhật ký lái xe (log) theo bước thời gian cố định. - Có thể tùy biến phím tắt điều hướng trong phần mềm.
 LOADING | ||||||||||