| New Products & Service | CG・VR | ||||||||||||||
●출시일: 2022년 6월 3일 |
|||||||||||||||
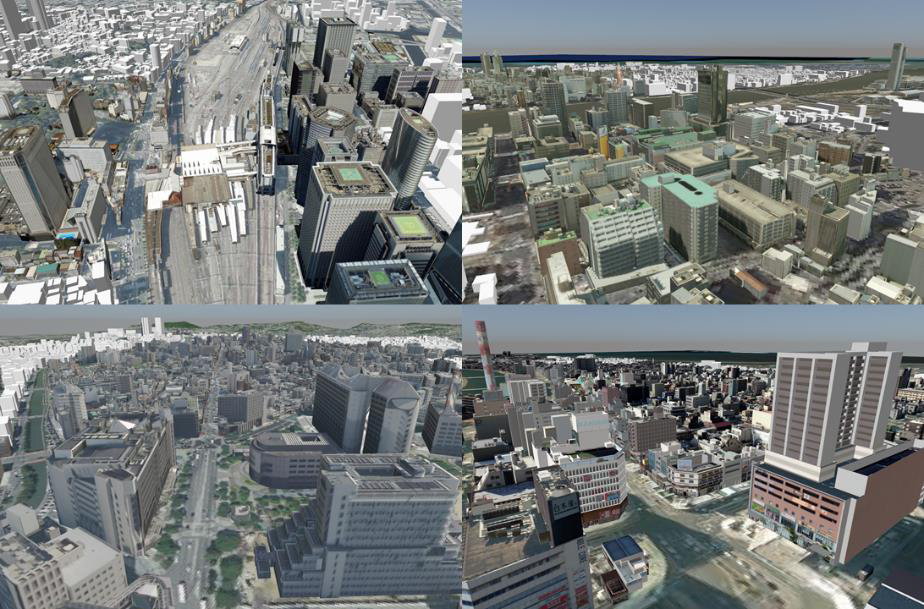
CityGML 및 PLATO 지원 확대 UC-win/Road Ver.16은 일본 국토교통부가 추진하는 3D 도시모델 프로젝트 PLATEAU에서 작성한 CityGML 형식의 도시모델을 가져와서 UC-win/Road 환경에 건축모델을 배치하는 새로운 기능을 탑재했습니다. 이전 버전에서는 사용자가 FBX 및 OBJ 형식을 통해 도시 모델 데이터를 가져올 수 있었지만, 이제는 모든 PLATEAU 도시 모델 데이터를 CityGML 형식으로 UC-win/Road에 직접 가져올 수 있습니다.
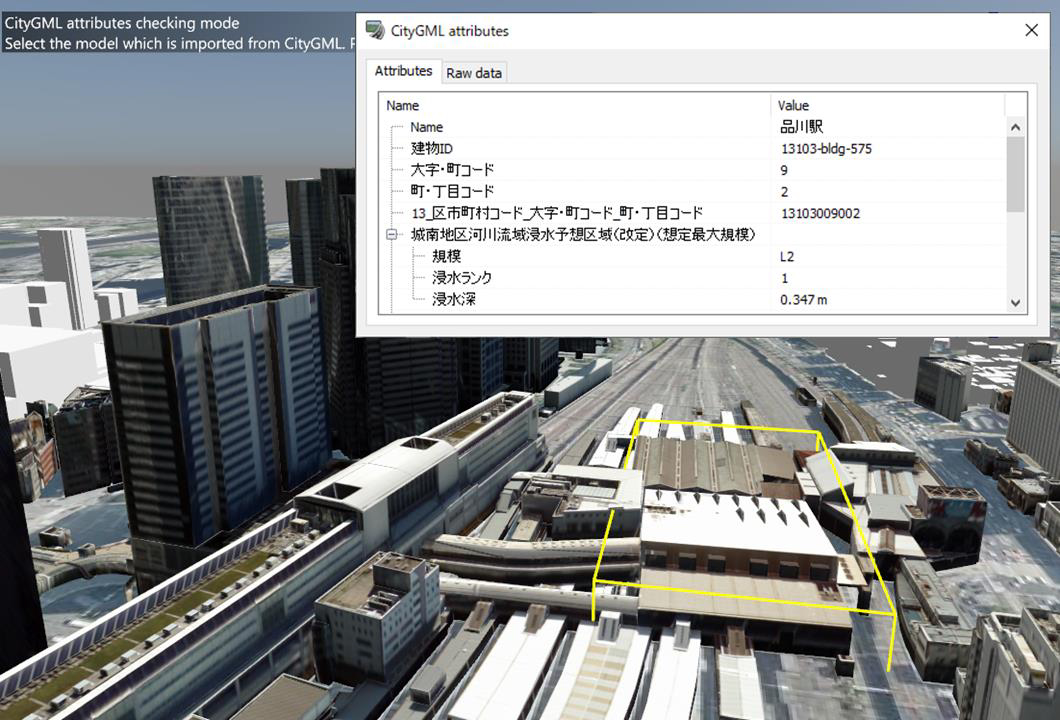
또한 CityGML 파일에 포함된 건물 데이터의 속성 정보를 가져와서 FBX 및 OBJ 가져오기로 볼 수 없었던 PLATEAU 도시 모델 데이터에 포함된 속성 정보를 UC-win/Road에서 볼 수 있습니다. 건물 모델의 기본 정보는 물론, 홍수 및 쓰나미에 의한 침수 예측도 포함되어 있으면 조회가 가능합니다.
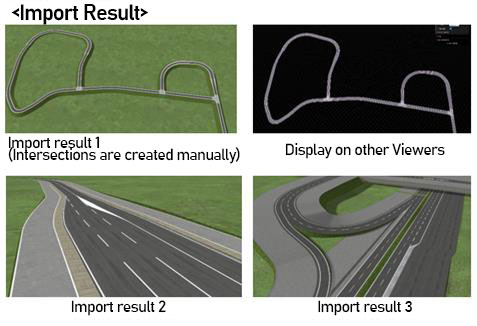
불러온 CityGML 파일의 형상과 속성 데이터를 이용한 시뮬레이션에 연계하고, 속성으로 시각화하며 UC-win/Road의 시뮬레이션 결과를 CityGML로 내보내어 디지털 트윈 플랫폼으로서 UC-win/Road의 가치를 높이기 위한 기능을 개발할 예정입니다. ASAM OpenDRIVE OpenDRIVE®는 ASAM(Association for Standardization of Automation and Measuring Systems)에서 추진하는 첨단 자율주행을 위한 고정밀 도로망의 국제 기본 표준입니다. UC-win/Road Ver.16에는 ASAM OpenDRIVE® 파일을 가져오는 기능이 있습니다. OpenDRIVE®를 통해 외부 소프트웨어에서 생성된 도로 네트워크(도로, 차선)를 UC-win/Road로 가져와 시뮬레이션 환경을 만드는 비용을 줄이는 것이 목적입니다. 최근 몇 년 동안 ADAS 및 AD 기능의 개발 및 검증을 위해서는 고정밀 지도의 사용이 필수적입니다. OpenDRIVE®에 대한 내보내기 기능을 개발하고, UC-win/Road의 활용도를 높이기 위해 고정밀 맵에 대한 가져오기 기능을 개발하여 이러한 개발 및 검증에 활용할 예정입니다.
클러스터 다중 사용자 기능 확장 기존 다중 사용자 클러스터 기능과 연동하여 클라이언트 사용자의 상태에 따라 시나리오 전환 조건을 변경할 수 있습니다. 또한 메인 사용자 뿐만 아니라 클라이언트 사용자에게도 이벤트를 발생시킬 수 있습니다. 예를 들어 자율주행, ADAS, 교통안전 등의 R&D 분야에서 운전자 2명과 주변 차량의 운전을 시뮬레이션하는 클러스터 시스템을 구축하면 운전자들은 서로에게 메시지와 음성 메시지를 보내 상대 운전자의 위험한 운전 행동을 알릴 수 있습니다. 리본 메뉴의 시나리오 탭에서 다중 사용자 편집 화면에서 사용자를 등록할 수 있습니다. 등록된 사용자는 시나리오 전환 조건 및 이벤트 대상으로 사용할 수 있습니다. 클러스터 마스터 화면의 각 컴퓨터에 사용자를 분배합니다. 기타 기능 기타 개선 사항 및 개선 사항은 다음과 같습니다. - 환경 지도는 거울 반사(반사성) 매개변수로 반영할 수 있습니다 - 도로 구간 CSV 파일 가져오기/내보내기: 도로 구간은 도로 구간 목록의 RS 파일 뿐만 아니라 CSV 파일로도 가져오고 내보낼 수 있습니다 - 도로변 오브젝트의 편집 화면 확장으로 텍스처 및 모델 데이터 일괄 업데이트, 목록 내 정렬 및 데이터 검색이 쉬워졌습니다. - 비, 눈, 바람 등의 날씨 표현을 점진적으로 변경할 수 있습니다. - 로그를 일정한 시간 단위로 내보낼 수 있습니다. - 탐색을 위한 키보드 단축키를 사용자 정의할 수 있습니다.
 LOADING | |||||||||||||||