| New Products & Service | CG・VR | ||
●发布日期2022年6月3日 |
|||
|
|
|||
作为Shade3D的单独销售选项,我们将推出基于c++语言进行功能开发的插件SDK。
支持CityGML和PLATEAU的扩展
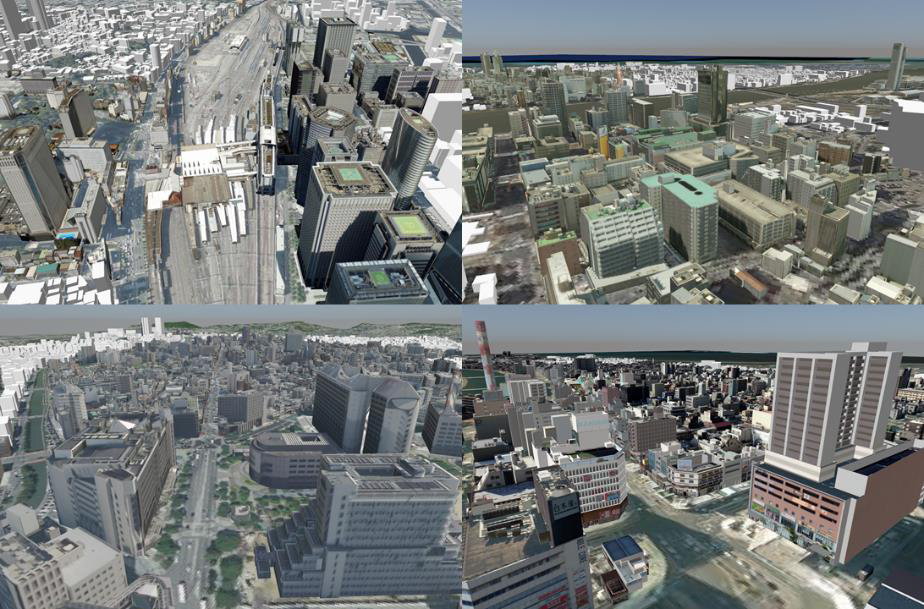
支持CityGML格式文件读取,该文件格式是日本国土交通省推进的3D城市模型计划PLATEAU所创建的城市模型,可在UC-win/Road中配置此格式的建筑模型。
现有版本也可以通过FBX、OBJ格式读取,因为新版本支持CityGML格式,所以仅UC-win/Road就可以读取所有PLATEAU的城市模型数据。
 |
|
| 图1 在日本地理院Tiles地形上叠加PLATEAU建筑物数据的示例 | |
此外,还可以读取CityGML文件中包含的建筑模型的属性信息,现在还支持在UC-win/Road上查看PLATEAU城市模型数据中包含的属性信息的新功能,以前通过FBX和OBJ格式导入无法处理。
可以查看建筑模型中包含的各种基本信息,洪水和海啸淹没预报的信息。
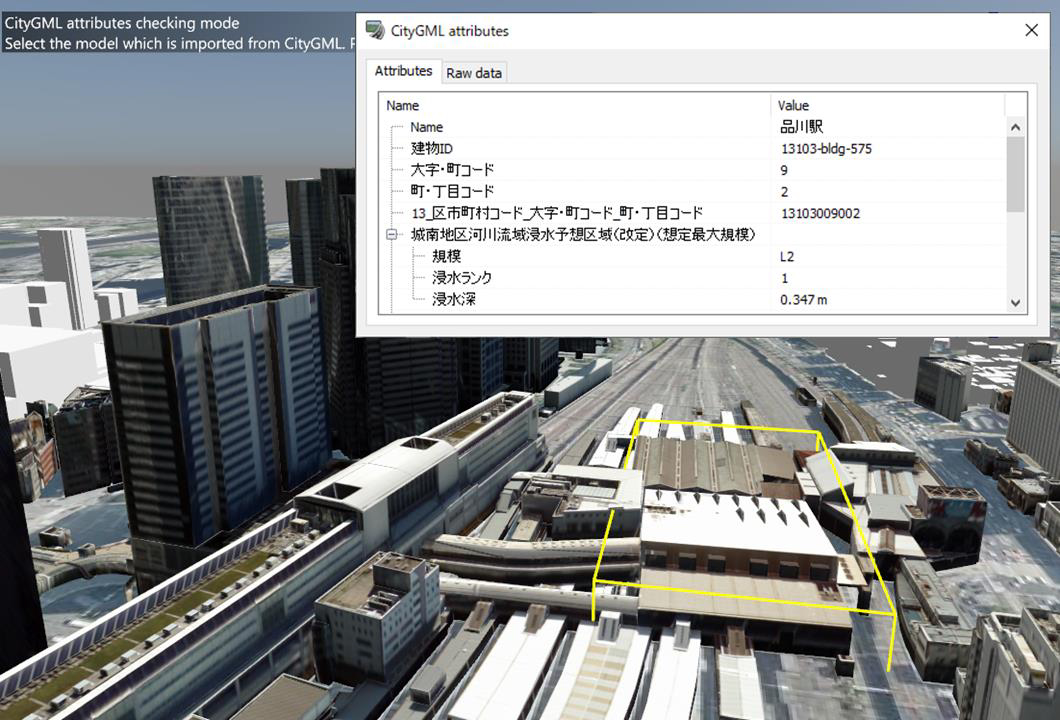 |
| 图2 属性信息的阅览 |
今后,我们将开发利用导入的CityGML的形状和属性信息与各种模拟连接的功能、利用属性并以易于理解的方式显示的可视化功能、以及将模拟结果从UC-win/Road重新导出到CityGML的功能,将提高UC-win/Road作为数字孪生平台的价值。
支持ASAM OpenDRIVE
OpenDRIVE®是由ASAM(Association for Standardization of Automation and Measuring Systems)推进的用于高度自动驾驶的高精度道路网络的国际标准规格。
UC-win/Road Ver.16提供ASAM OpenDRIVE®文件导入功能。通过OpenDRIVE®将用外部软件制作的道路网络(道路、车道)导入到UC-win/Road,目的是降低制作模拟环境所需的成本。近年来,在ADAS及AD功能的开发验证中,高精度地图的应用变得不可或缺。
今后为了能够在这些开发验证中进一步利用UC-win/Road,将继续推进OpenDRIVE®的导出功能和高精度地图的导入功能等的开发。
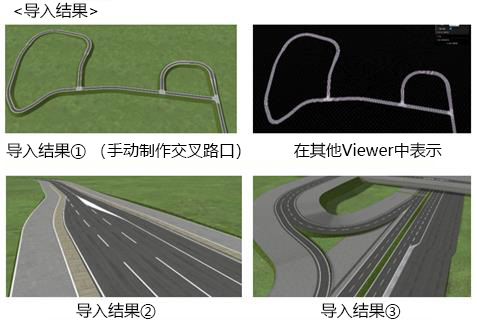 |
| 图3 OpenDrive数据导入结果示例 |
集群多用户功能的扩展
配合传统的多用户集群功能,可以根据客户端用户的状态改变场景的转移条件。另外,场景中的事件不仅可以发送给主控用户,也可以发送给客户端用户。
例如,在自动驾驶、ADAS和交通安全相关的研究开发中,构筑了模拟2名驾驶员和周边车辆的集群系统时,可以通过信息和声音将一方驾驶员的危险驾驶等通知给另一方司机。
可以在功能区菜单的场景标签上的多用户编辑画面中注册用户。注册的用户可以作为场景的转变条件和事件的目标使用。具体分配给哪个用户,在集群主控界面中,将用户分配给每台机器。
其他的功能扩展
除此之外还进行了以下主要的改善和扩展。
・模型的镜面反射(Shininess)参数允许在环境图中进行反射。
・道路截面的CSV输入输出功能:在道路截面列表画面中,除了RS文件之外,还可以导入、导出CSV文件。
・扩大了道路附属物的编辑画面,纹理和模型数据的一次性更新和一览显示的排序和数据检索变得容易。
・可以使雨、雪、风的气象表现逐渐发生变化。
・日志输出功能已扩展到可以每隔一定时间输出一次。
・可以自由自定义导航键盘快捷键。
| (Up&Coming '22 夏季刊) |
|
|


LOADING