| Sản phẩm & dịch vụ mới | Diễn họa / Mô phỏng | ||||||||
●Giá niêm yếtUSD 3,000 ●Phát hànhTháng 03 năm 2022 |
|||||||||
|
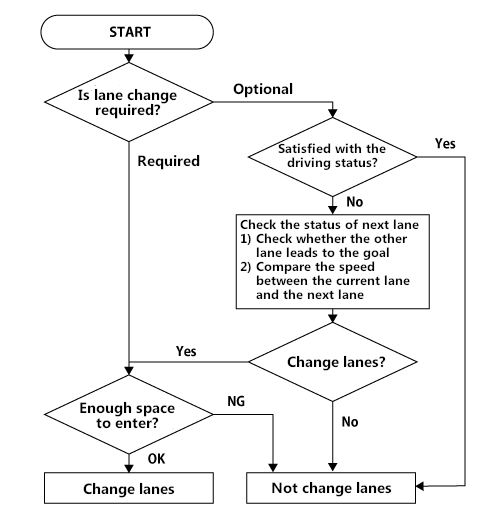
Tổng quan Trước đây, trong tính năng mô phỏng giao thông của UC-win/Road, các phương tiện xuất hiện từ điểm đầu/ cuối của đường hoặc các phương tiện xuất hiện trong khu vực nút giao khi lưu thông đến các khoảng Transition (khoảng chuyển tiếp tại khu vực có thay đổi về số làn xe của đường) và khu vực nút giao, thì các phương tiện này sẽ di chuyển theo tỷ lệ phân bổ dòng giao thông tại mỗi nhánh/ làn đã được thiết lập trước đó. Tuy nhiên, giả sử một làn xe có quá đông phương tiện lưu thông trong khi những làn khác thông thoáng, thì UC-win/Road chưa thể mô phỏng được hành vi chuyển làn để tránh làn đường đông của phương tiện. Do đó, chúng tôi đã phát triển và sẽ trang bị thêm tính năng mới này. Tổng quan về các mô hình chuyển làn (lane change model) Hành vi chuyển làn được chia thành 2 loại: chuyển làn bắt buộc và chuyển làn tùy chọn (chuyển làn tự do). Chuyển làn bắt buộc có nghĩa là việc cần thiết phải chuyển làn để đến điểm đích. Ví dụ, nếu xe phải rẽ phải để đi đến điểm cần đến, thì việc chuyển làn của xe sang làn rẽ phải gọi là chuyển làn bắt buộc. Chuyển làn tự do là việc chuyển làn để di chuyển nhanh hơn bởi phương tiện không thể di chuyển nhanh trên làn đường đang chạy. Các phương tiện thực hiện chuyển làn sau khi đánh giá việc chuyển làn là bắt buộc hay tùy chọn.
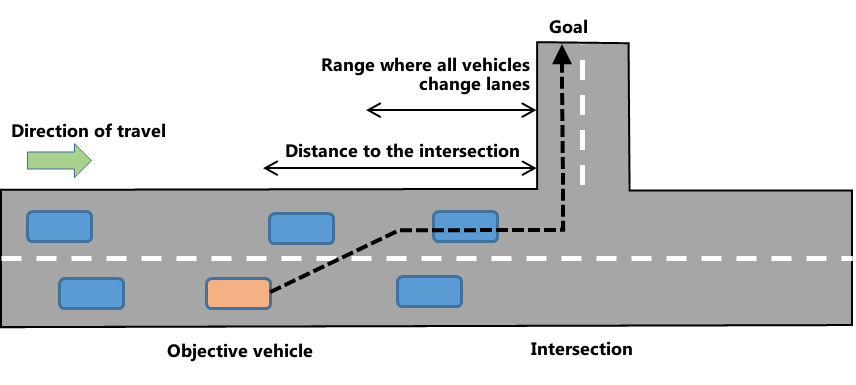
Xác định việc chuyển làn là bắt buộc hay tự do Khi mỗi phương tiện di chuyển đến gần nút giao và cần rẽ để đi tới điểm đích, tỷ lệ chuyển làn bắt buộc sẽ cao hơn, và các phương tiện sẽ chuyển làn trong khoảng cách chuyển làn xác định.
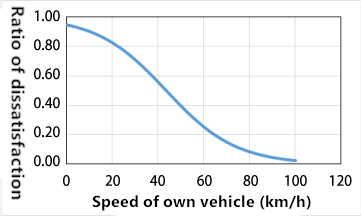
Chuyển làn tự do Trường hợp các phương tiện chuyển làn tự do, đầu tiên phần mềm sẽ thực hiện so sánh tốc độ hiện tại của phương tiện và tốc độ kỳ vọng của loại phương tiện đó, để đánh giá mức độ "đạt kỳ vọng". Thang đo mức độ "đạt kỳ vọng" khác nhau tùy theo loại phương tiện, bởi phương tiện kích cỡ lớn sẽ khó khăn trong việc chuyển làn hơn phương tiện cỡ nhỏ. Các thông số khác nhau được thiết lập cho từng phương tiện để tái hiện sự khác nhau trong tần suất chuyển làn của mỗi phương tiện khác nhau.
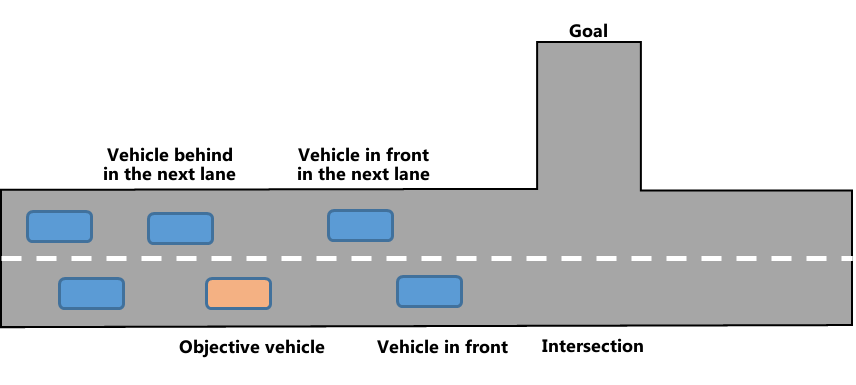
Đối với những phương tiện không đạt mức kỳ vọng, việc xác định chuyển làn sẽ được thực hiện dựa trên đánh giá về tốc độ của chính phương tiện đó, của phương tiện phía trước, phía sau và của các phương tiện đang chạy trên làn đường mục tiêu.
Kiểm tra khoảng trống khi nhập vào làn đường mục tiêu Các phương tiện sẽ chuyển làn sau khi xác nhận rằng có đủ khoảng trống để đi vào giữa các xe trên làn đó. Kế hoạch phát triển trong tương lai Chúng tôi sẽ tiếp tục phát triển các chức năng mô phỏng gồm tập hợp các kết quả mô phỏng, cài đặt lưu lượng giao thông thay đổi theo thời gian và cài đặt lưu lượng sử dụng lưu lượng điểm đầu - điểm cuối (OD). |
|||||||||
| (Up&Coming '22 Ấn bản năm mới) |
|
|

