| New Products & Service | |||||||||||||||||||||||||
|
自動運転パッケージ 国家公安委員会から安全運転シミュレータが型式認定を取得 ●新規価格未定 ●リリース 2021年1月 |
|||||||||||||||||||||||||
|
自動運転パッケージは、UC-win/Roadによるシミュレーションの中でも「自動運転研究シミュレーション」、「ADAS」、「センサーデータ模擬」(図1参照)の分野で活用されることを想定したUC-win/Roadのプラグインパッケージであり、表1のプラグインから構成されます。 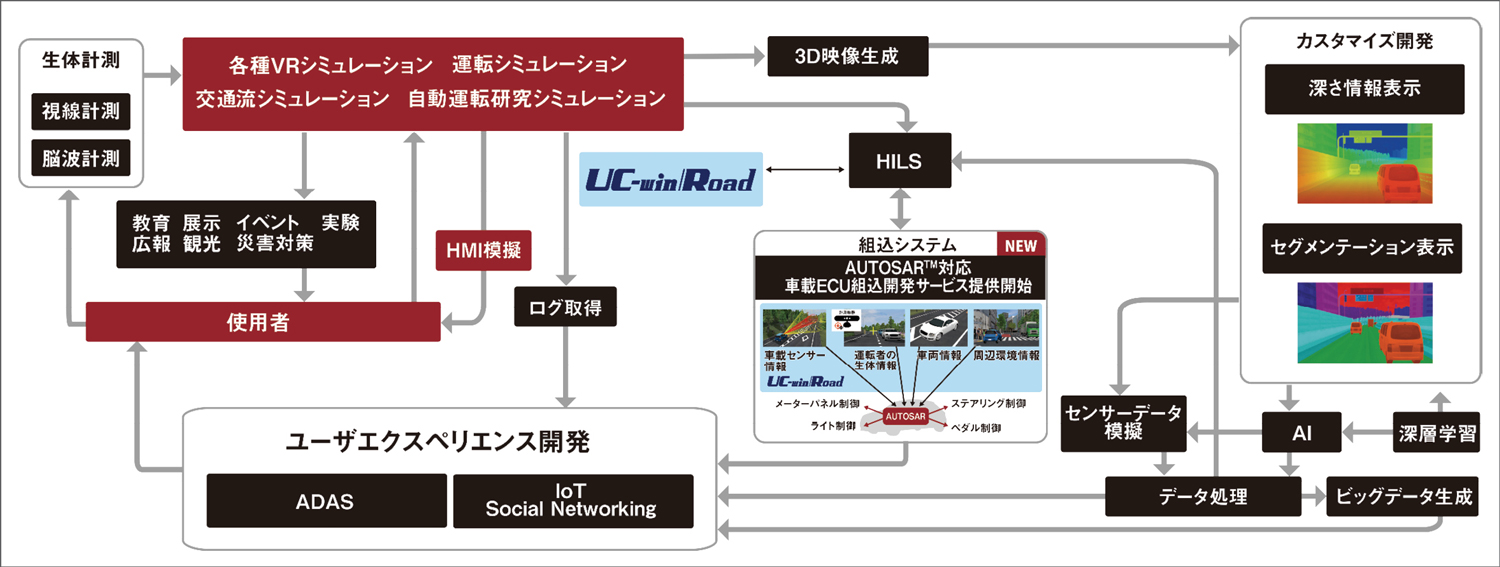 図1 UC-win/Roadによる各種VRシミュレーションと自動運転パッケージとの関係
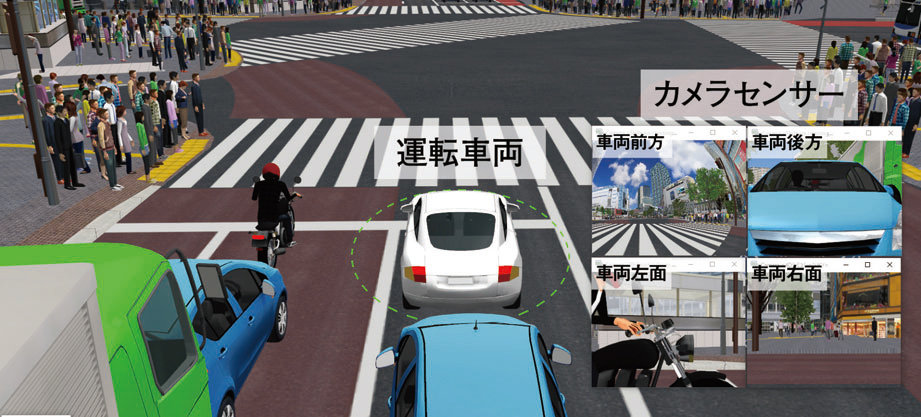
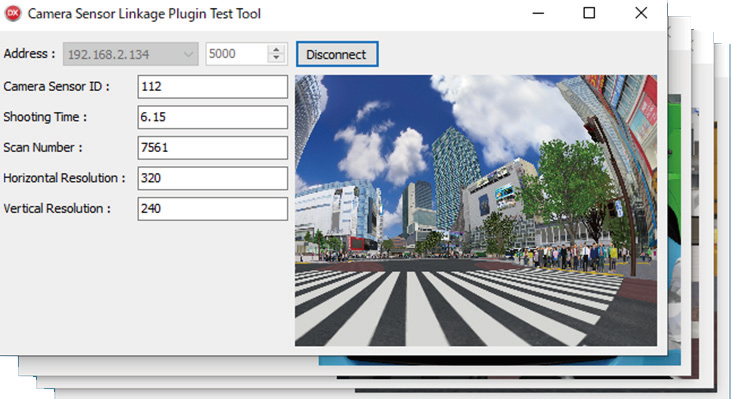
表1 自動運転パッケージ概要 ※2 既に製品化されているプラグイン(Up&Coming No.117にて紹介) ※3 カメラセンサー基本プラグインの拡張機能 ※4 カメラセンサー基本プラグインの拡張機能 運転情報IOアプリケーション UC-win/Roadとは独立したアプリケーションであり、IOデバイスから運転中の車両の操舵角、アクセル、ブレーキの情報をUC-win/Roadに送信します。また、UC-win/Roadの運転情報を受信し、フォースフィードバック等をIOデバイスへ反映させます。初版ではゲームコントローラ(Logicool G29)、InnoDS CDS/MDS/MotionDS(3DOF)に対応します。今後はSENSO Wheelなどに順次対応していきます。 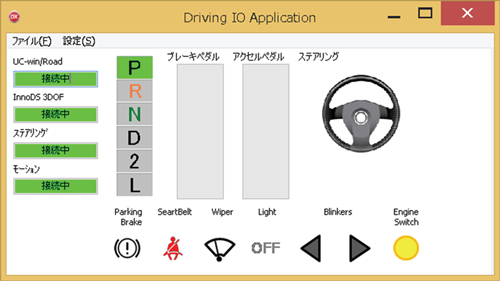 図2 車両運転モデル選択画面 車両制御プラグイン 車両制御プラグインは、外部の車両運動モデルと連携し、運転車両の情報を外部システムへ送信、外部システムから車両を操作します。 (1)CarSim連携機能 CarSim(バーチャルメカニクス社)で算出した車両挙動を、UC-win/Roadの車両へ反映します。 (2)その他の外部車両運動モデルとの連携機能 HILS等の外部車両運動計算システムと連携します。車両制御プラグインから運動計算に必要な車両情報を送信、車両運動計算ソフトから送信される車両運動結果情報を受信することにより、UC-win/Roadの車両に反映させます。 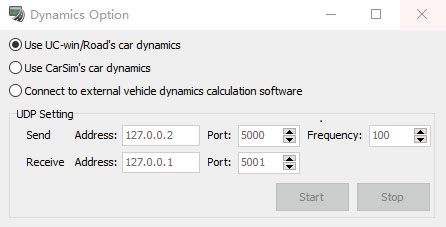 図3 車両運転モデル選択画面 (3)運転情報IOアプリケーションとの連携機能 TCP通信・UDP通信により、運転情報IOアプリケーションと連携します。これにより、外部デバイスから送信される車両情報(ペダル・操作角等)を外部の車両運動モデルが受け取り、最終的にUC-win/Roadの運転車両に反映することが可能です。 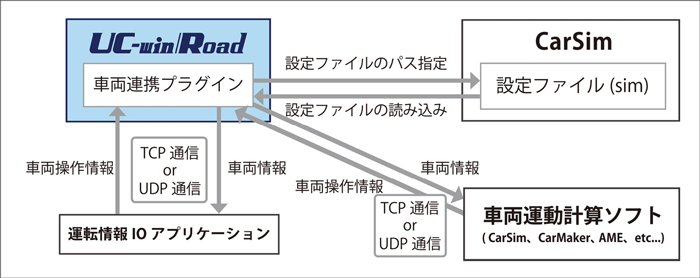 図4 車両制御プラグイン_運転情報IOアプリケーションの連携図 カメラセンサー模擬システム カメラセンサー模擬システムは、現実のカメラに近づけるためにUC-win/Road内のカメラを加工し、歪み画像を生成可能です。各カメラセンサーの取り付け位置にUC-win/Roadのメイン画面とは別のカメラを設置することで、運転操作中も各センサーの画像を確認出来ます。 さらに、UDP通信により外部システムに画像を送信も可能です。今後はカメラセンサーで描画できる範囲(視錐体)の可視化、センサー画面録画機能などに順次対応していきます。
|
|||||||||||||||||||||||||
| (Up&Coming '20 秋の号掲載) | ||
|

