| Sản
phẩm & dịch vụ mới |
|||||||||||||||||||||||||
|
Gói sản phẩm xe tự lái Thiết bị mô phỏng lái xe đã nhận
được chứng nhận kiểu loại sản phẩm từ ●Giá bán: sẽ
thông báo sau ●Phát hành tháng 1/2021 |
|||||||||||||||||||||||||
|
Gói sản phẩm xe tự lái bao gồm các plugin hỗ trợ khả năng mô phỏng của UC-win/Road, ứng dụng trong lĩnh vực mô phỏng nghiên cứu xe tự lái, hệ thống hỗ trợ lái xe tiên tiến (ADAS) và mô phỏng dữ liệu cảm biến (xem Hình 1). Chi tiết các plugin trong gói này được liệt kê tại Bảng 1. 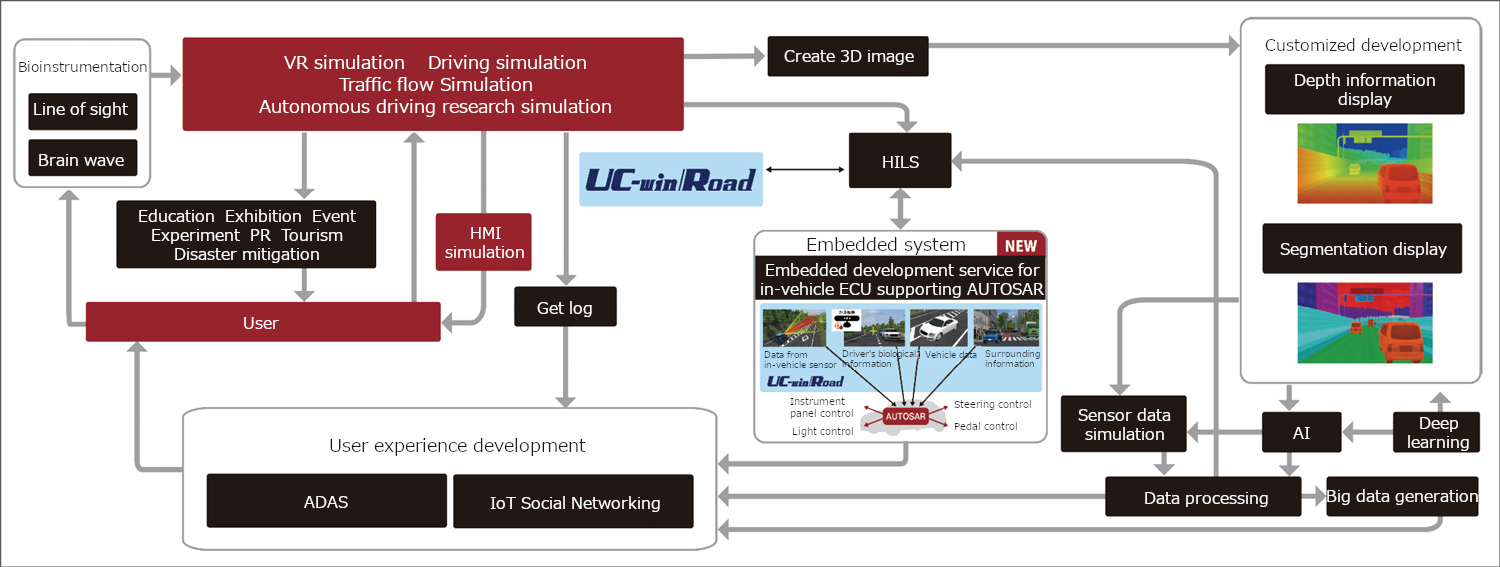
Hình 1. Liên kết giữa các loại mô phỏng thực tế ảo (VR) trên UC-win/Road và gói sản phẩm xe tự lái
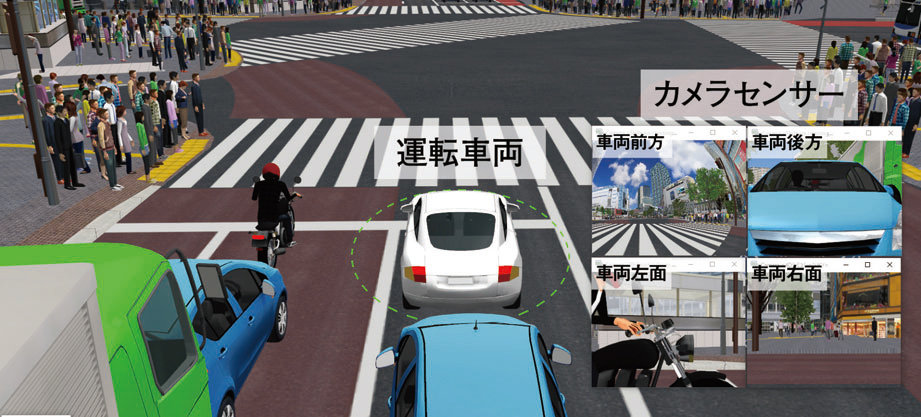
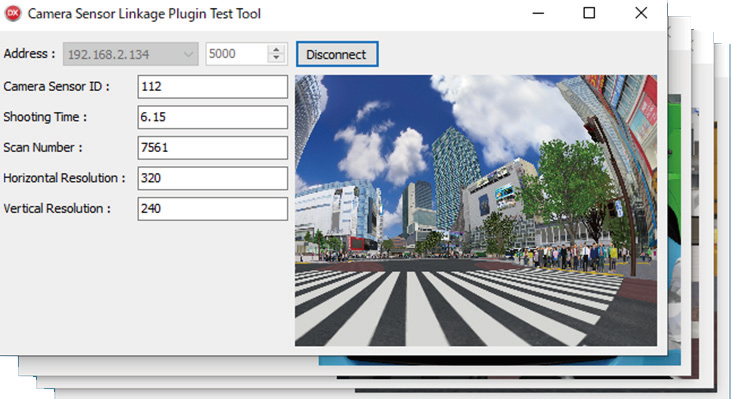
Bảng 1. Sơ lược về gói sản phẩm xe tự lái ※2: Plugin đã thương mại hóa (Giới thiệu tại Up&Coming Vol. 117) ※3: Là phần mở rộng tính năng cho plugin cảm biến camera cơ bản (Camera Sensor Base plugin) ※4: Là phần mở rộng tính năng cho plugin cảm biến camera cơ bản (Camera Sensor Base plugin) Ứng dụng input/output dữ liệu lái xe Là ứng dụng độc lập với UC-win/Road, có trách nhiệm gửi dữ liệu về góc đánh lái, chân ga/phanh của xe đang trong quá trình lái tới UC-win/Road. Ở chiều ngược lại, ứng dụng thu thập dữ liệu vận hành từ UC-win/Road và truyền các tín hiệu (như lực phản hồi) đến các thiết bị I/O. Phiên bản đầu tiên đang hỗ trợ bộ điều khiển lái (game controller) (Logitech G29) và bộ InnoDS CDS/MDS/MotionDS (3DOF). Dự kiến phiên bản tới sẽ hỗ trợ các thiết bị khác như SENSO Wheel. 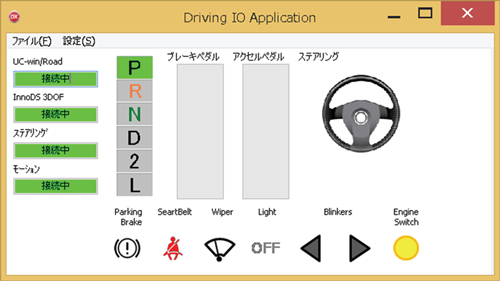 Hình 2. Màn hình tùy chọn mô hình chuyển động xe (car dynamics) Plugin điều khiển phương tiện Plugin này liên kết với mô hình chuyển động của xe bên ngoài để gửi dữ liệu của xe đang trong quá trình lái đến hệ thống bên ngoài, nhằm vận hành xe từ hệ thống bên ngoài. (1) Tính năng liên kết với CarSim UC-win/Road thu thập và trực quan hóa kết quả tính toán về chuyển động xe từ phần mềm CarSim (chuyên về động lực học xe)(2) Tính năng liên kết với các loại mô hình chuyển động bên ngoài xe khác Liên kết với hệ thống tính toán chuyển động của xe bên ngoài như HILS (mô phỏng thời gian thực vòng điều khiển bằng phần cứng). Phần mềm tính toán chuyển động của xe sẽ thu thập các dữ liệu cần thiết cho việc tính toán từ plugin điều khiển xe, sau đó UC-win/Road sẽ trực quan hóa kết quả tính toán này trên trình mô phỏng. 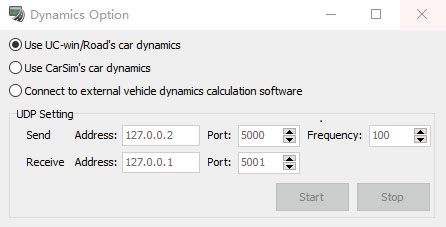 Hình 3. Màn hình lựa chọn mô hình chuyển động xe (3) Chức năng liên kết với ứng dụng IO thông tin lái xe Liên kết với ứng dụng I/O dữ liệu lái xe bằng giao thức TCP/UDP. Mô hình chuyển động của xe bên ngoài có thể thu thập dữ liệu về phương tiện (bàn đạp, góc đánh lái, v.v.) từ thiết bị ngoại vi, sau đó UC-win/Road sẽ trực quan hóa dữ liệu này trên trình mô phỏng. 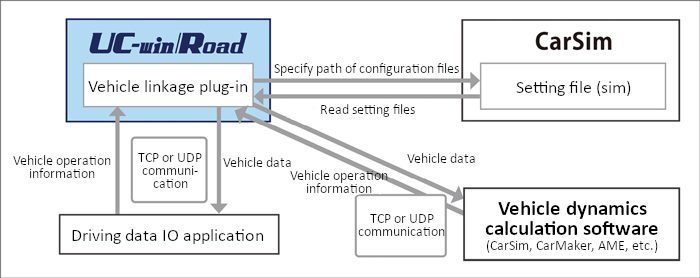 Hình 4. Plugin điều khiển xe: Sơ đồ liên kết ứng dụng I/O dữ liệu lái xe Hệ thống mô phỏng cảm biến camera Hệ thống mô phỏng cảm biến camera có thể xử lý ảnh trong UC-win/Road để tạo ra hình ảnh góc rộng (ảnh bị biến dạng) để gần với thực tế hơn. Tại ngay vị trí lắp các cảm biến camera sẽ được lắp thêm camera (khác với camera chính của hệ thống UC-win/Road) giúp người lái có thể kiểm tra hình ảnh của từng cảm biến ngay cả trong quá trình lái xe. Ngoài ra, hình ảnh có thể truyền đến các hệ thống ngoại vi bằng UDP. Dự kiến, các tính năng về trực quan hóa vùng cảm biến camera, ghi lại màn hình cảm biến, v.v. cũng sẽ được phát triển trong thời gian tới
|
|||||||||||||||||||||||||
| (Up&Coming '20 Ấn phẩm mùa thu) | ||
|
