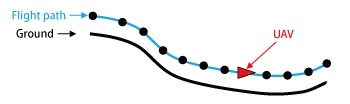
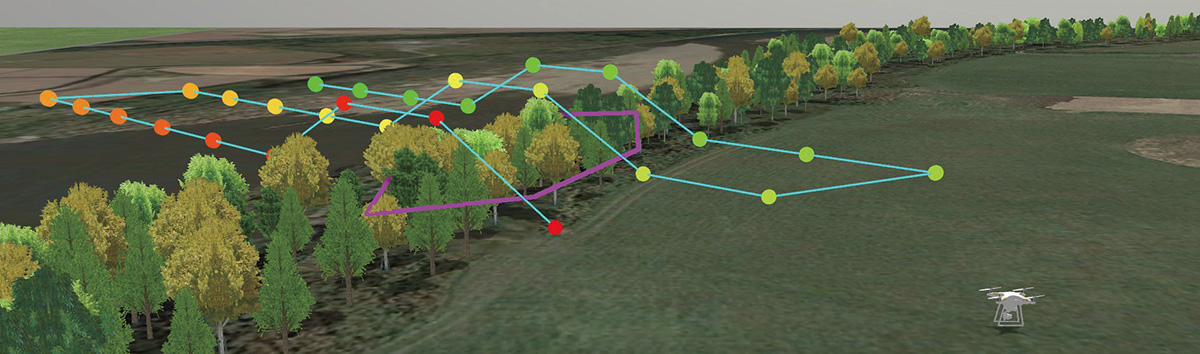
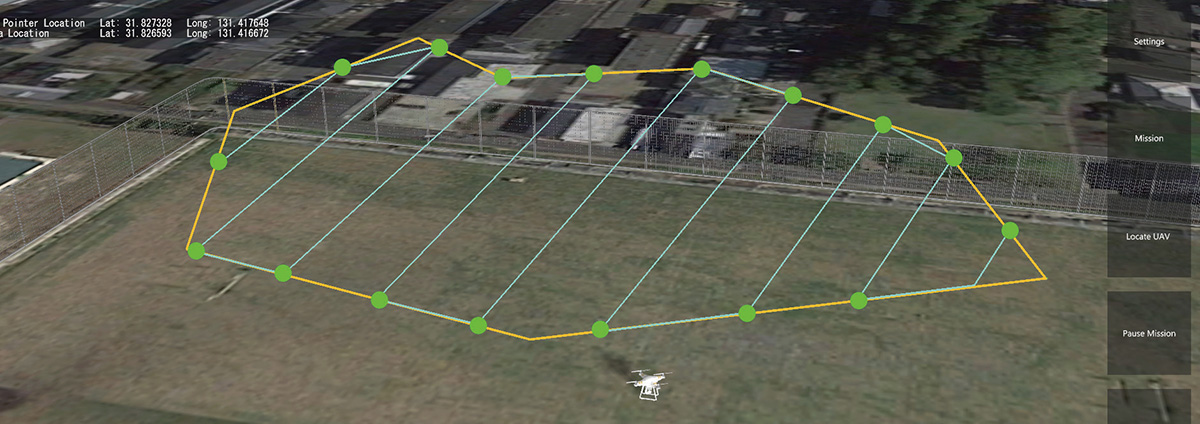
Parameters such as mapping position and range, overlap coefficient, and pixel resolution can be set, and shooting range and expected flight path can be checked in the mission preview (Fig.1).
After confirming the preview, click "Start" button to start flight. The UAV automatically takes off, flies according to the defined path, and shoots photos. It automatically lands on the last shooting position or the place of the takeoff.
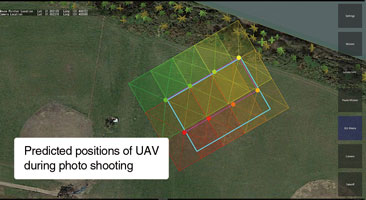
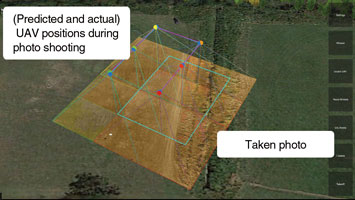
In the preview of the mapping mission, thumbnails of images taken during the flight mission are displayed over the actual positions (Fig.2). This allows you to check the mapping mission result and correctness of photo before downloading in full resolution.
 |
 |