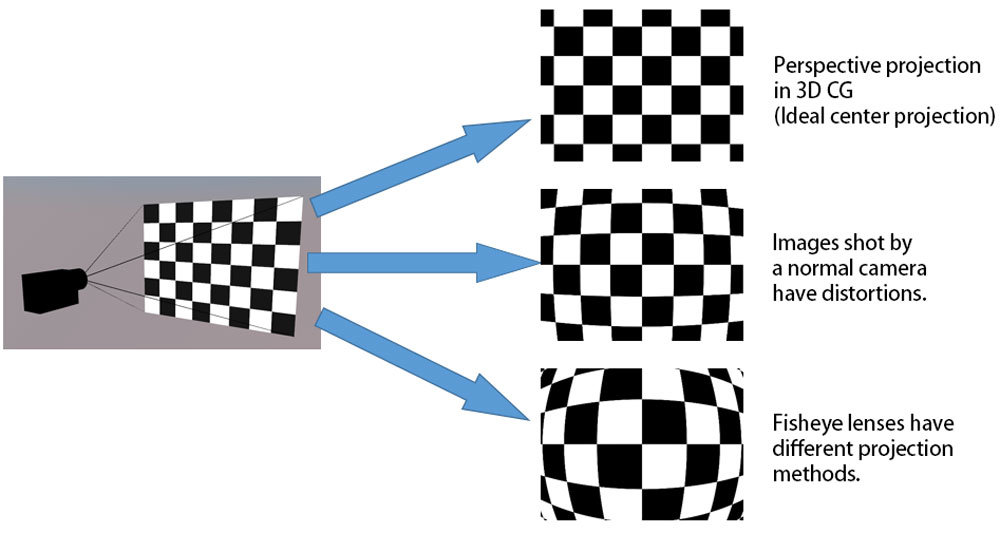
| Perspective projection that draws in the range of the square pyramid with
the viewpoint position at the vertex is usual for 3D CG rendering, and
this method is also used for the rendering in UC-win/Road. As for actual
cameras, the central projection that is the same method as the CG perspective
projection is general. However it doesn't always match the perspective
projection because these lenses also have distortion in some degree. Moreover, as for the fisheye lens that a wide view angle can be shot with, the used projection method is not the central projection method, but the equidistance projection that the distance from the center is proportional to angle, and the equisolid angle projection that the area from the center is proportional to solid angle. This plug-in has been developed in order to achieve the simulation of the shooting by a real camera on UC-win/Road. |
 |
||