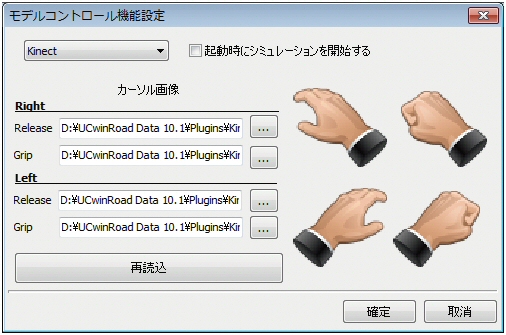
| Kinect
Plugin puts data imported from depth sensor to full use. Devices that
can work with the plugin are KinectTM Sensor for Xbox, Xtion
Pro, and Xtion Pro Live. These 3 sensors all have depth sensing
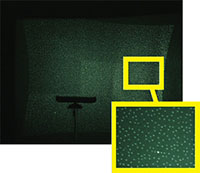
capability based on PrimeSense technology, with an infrared projector
that projects a pattern of infrared light which falls on objects
around it like a sea of dots and an infrared camera that can see the
dots. With infrared light waves at approximately 780nm, these dots
are invisible to the human eye, but are visible to a night vision
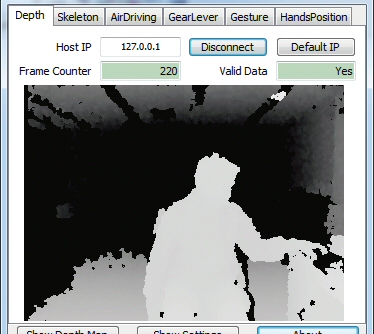
camera (see figure 1). The camera sends it's video feed of this
distorted dot pattern into the depth sensor's processor, and the
processor works out depth from the displacement of the dots. On near
objects the pattern is spread out, on far objects the pattern is dense.
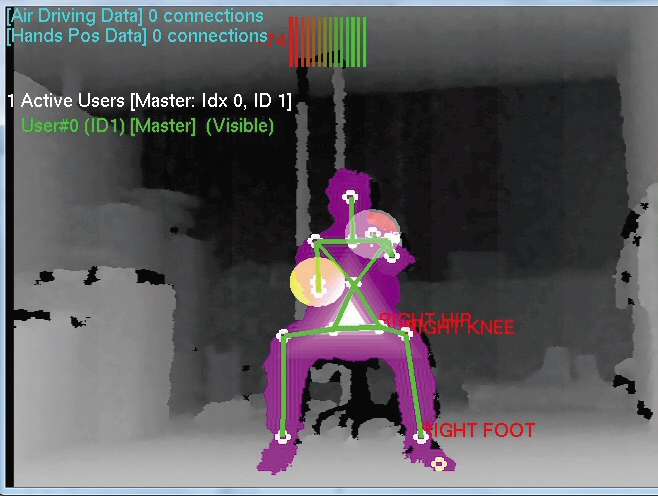
This 'worked out' depth map can be read from the depth sensor into the
computer. Depth map can then be analyzed by comparing and contrasting
dot pattern on each person detected by the sensor that define a
person's skeletal structure to figure out who is who.
|
|
 Pattern of infrared light Pattern of infrared light |