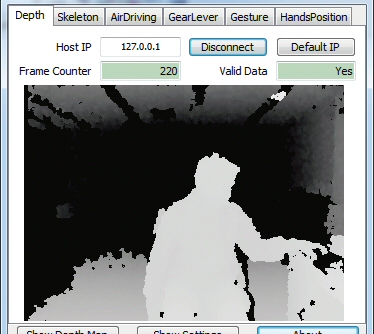
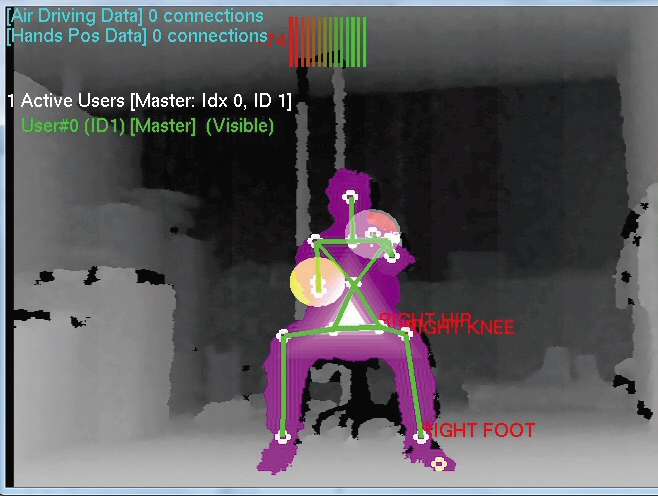
| Kinect插件使用Depth感測器的數據。對應設備為KinectTM Sensor for Xbox、Xtion Pro、Xtion Pro Live。這三種感測器以PrimeSense技術為基礎,投影紅外線圓點圖案,探知紅外線照相機。人的眼睛雖然無法看清(周波數大約為780nm)、但可使用有暗視功能的照相機捕捉(圖1)。在障礙物進入感測器的探知區域時,因為雷射的模樣變亂,感測器可製作攝影領域的Depth Map。並且,分析Depth Map,還可判斷形狀。更詳細的分析使各種的形狀與人體的形狀結合,判斷人的骨格。 |  ▲圖1 紅外線雷射 |