Figure 1 is the all devices to be used. The system consists of DJI Phantom 3 Professional, a remote controller, a tablet (Android interface), a laptop (UC-win/Road and UAV plug-in), and a Wi-Fi router (for the connection between UC-win/Road and Android interface).
Recently we have succeeded in the field flight test to check the functions of flight plan editing, upload, execution, and monitoring on real-time.
 |
 Fig.1 UAV operation system Fig.1 UAV operation system |
At the upper left of Figure 2 is a UAV plug-in window. It is for various settings and a display of real-time data. At the lower left is the flight editing screen, on which flight plans can be created by setting the passing points and the behavior (taking photos or videos) there. Users can start the flight after the creation of the flight plan. Figure 3 is an image of a flight. Automatically the UAV takes off, flies along the planned route, and lands at the final passing point.
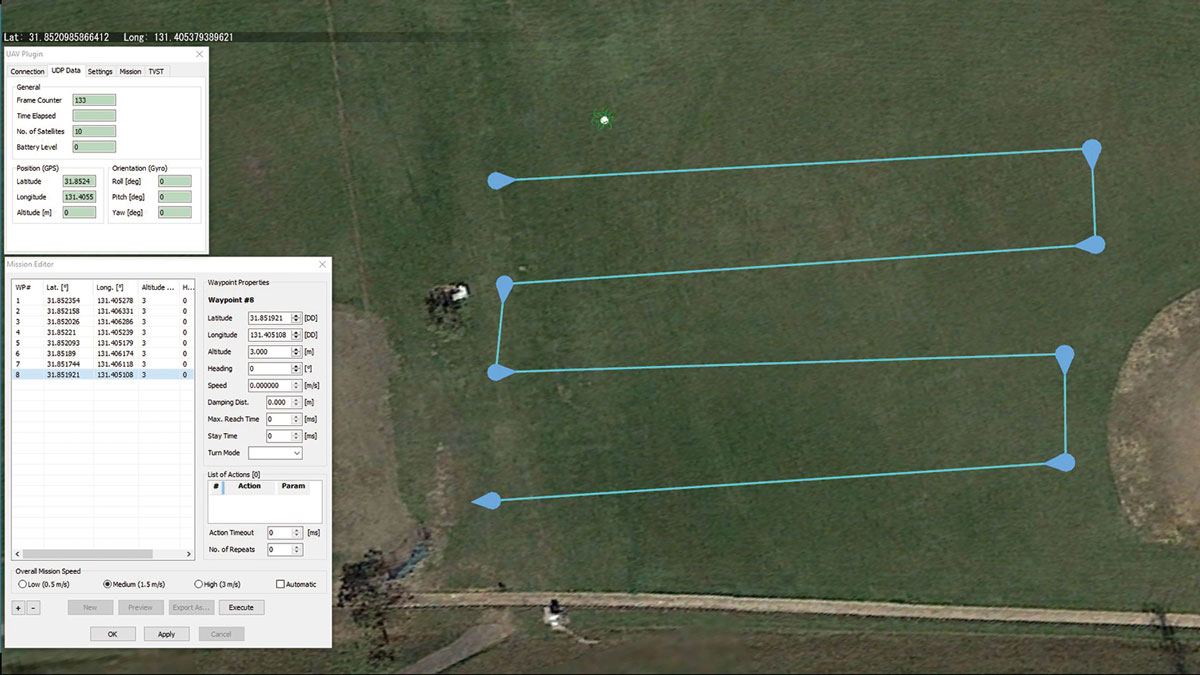 |
| Fig.2 UAV plug-in of UC-win/Road and the flight editing screen |
A white line under the UAV in the figure 3 is a visualization of the vertical line to the ground to make the UAV's height clear.
 |
| Fig.3 Execution of the flight plan |

