 |
 |
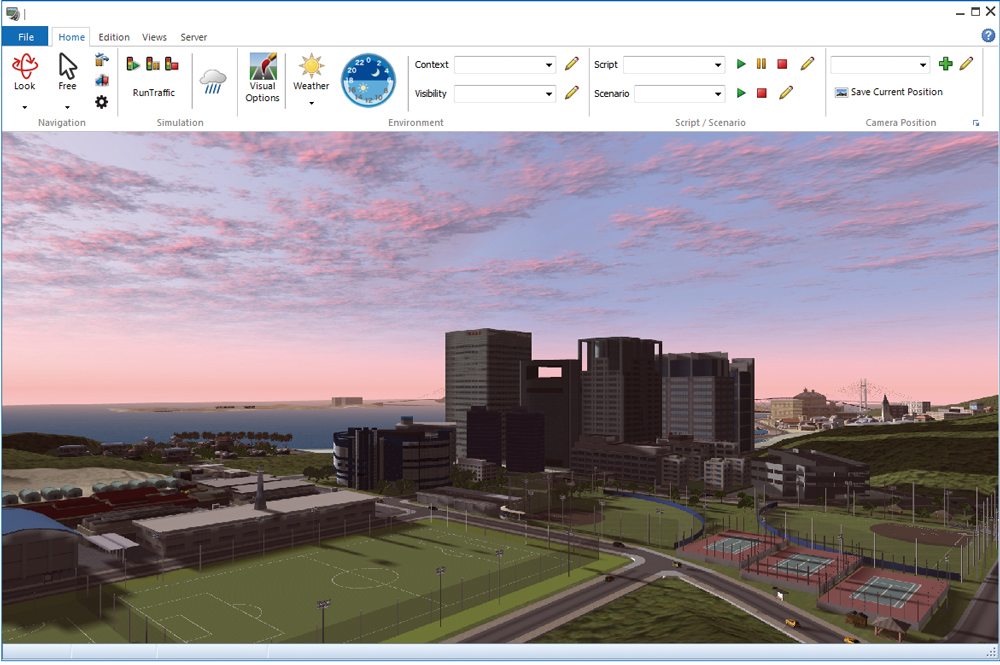
| ▲圖1 VR-Cloud® | |
| New Products | ||||
|
| 標準支援VR-Cloud® |
支持VR數據的網路公開,以協作設計和遠端會議為目的之VR-Cloud®伺服器功能在UC-win/Road的Advanced及
Ultimate版本中,將作為標準功能搭載。VR-Cloud®可供在專案製作時對在遠端的相關人士進行演示與講解。可使用Android裝置來進行方
便的多人同步觀看與操作。
|
||||
| 使用者介面(UI)的改善 |
| 畫面選單類型採用「緞帶式(Ribbon)」的形式。以緞帶式功能區來替換掉目前的功能列選單及工具欄配置,讓作業中需要常使用的功能可以被快速找到,提高作業效率。 UC -win/Road的緞帶式功能區由「文件(File)」、「主頁(Home)」、「編輯(Edit)」、「視點(View)」、「伺服器 (Server)」、「插件(Plugin)」緞帶組成。各緞帶式功能區將相關功能集中,透過相應的圖標(Icon)表示,過往略微繁瑣的畫面設置將可以 被更加清楚的表現。
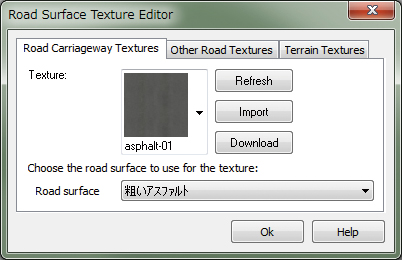
為了改善使用經驗,在使用模型、道路及天空材質時,更新材質用文件夾內的文件後,無需再重新啟動UC-win/Road就可直接使用。並且,材質選擇可能的全畫面界面統一後,以下功能將可在全畫面中使用。
|
| 對應Oculus Rift |
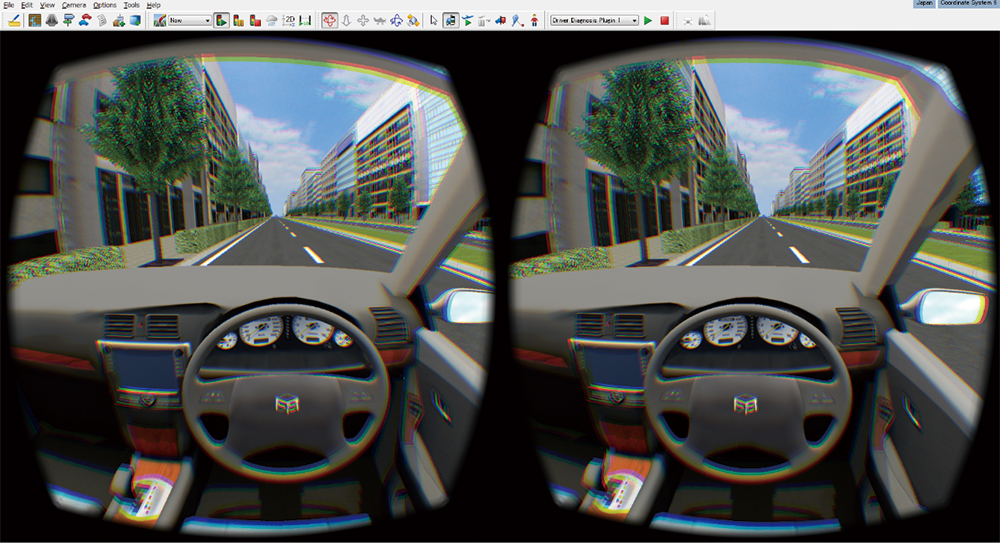
Oculus Rift是美國Oculus VR公司開發的密閉式頭戴型顯示器(Head Mounted Display-HMD)。與過往的HMD相比,其視角更為擴大(對角110°),使用本裝置,將可給予3DVR影像更大的沒入感及臨場感。
考 慮到立體視覺對於左右眼看到的會有視差,因此以不同的顯示器來顯示不同的影像(如圖四),並且,為了在兩眼的極近距離中讓配置的畫面看起來更大,能讓視野 廣闊的觀看,進行了與安裝鏡頭相反的歪曲顯示。與此配合的,還有與內藏的加速度感應器連動,讓使用者的頭部方向與影像的視線方向同步,以達到讓使用者自由 選擇視點來進行駕駛模擬或步行體驗。 HMD與一般的顯示器相比,可以更加正確的把握模型的立體感與距離感,在模擬可視化與演示上非常有效。 |
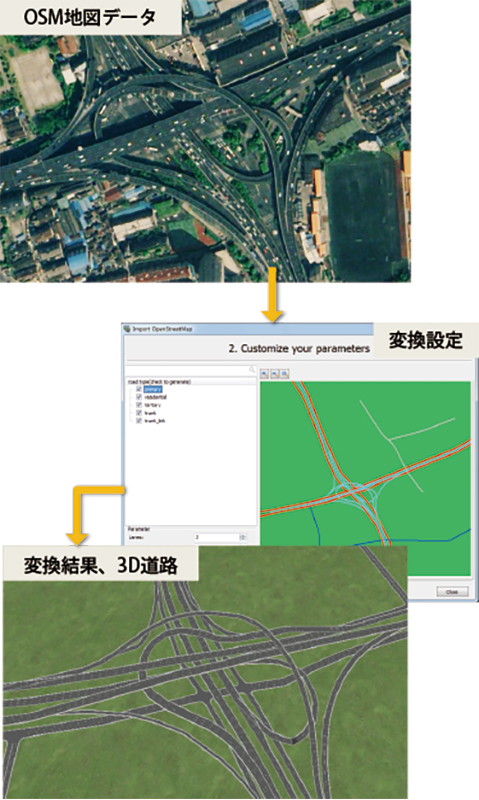
| 對應OpenStreetMap |
|
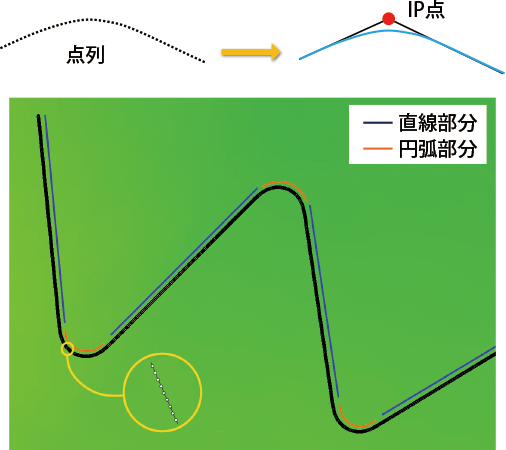
| 線型計算功能 |
|
| 3DS輸出功能改善 |
| 輸出3DS模型檔時,追加輸出XML文件,可將目標模型的座標訊息及景觀訊息功能作輸出。 使用輸出的3DS模型與XML文件,將能更自由的與第三方軟體作更高自由度的活用。 並且,還對應新的標識、道路標誌、背景、電線等物體的3DS模型輸出。 |
| SfM(Structure from Motion) |
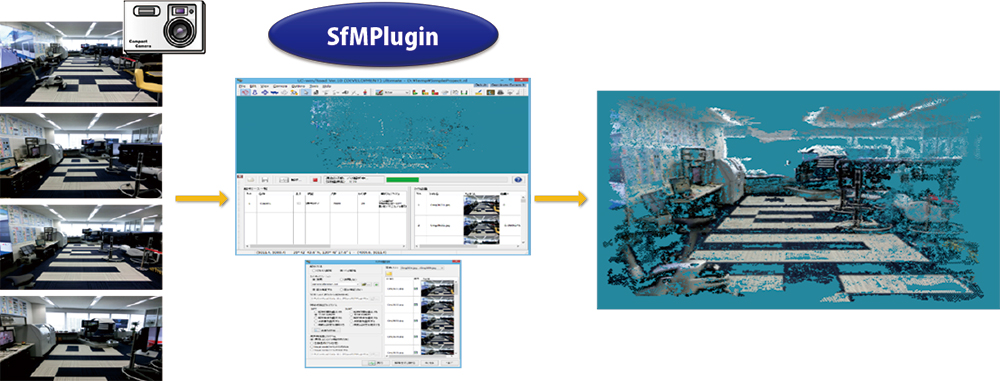
| 所謂的SfM(Structure from
Motion),係指藉由複數照片來生成3D座標點數據(點雲數據)的技術。SfM無需特殊的機器,只需使用一般的數位相機拍下的照片,就可簡單的製作
3D數據。SfMPlugin為使用UC-win/Road來進行SfM分析,並將其分析結果(點雲數據)用在UC-win/Road的成像上之插件。 SfMPlugin使用順序如下所示:
本插件可搭配車載照相機來在UC-win/Road作道路與道路構造物的還原,而使用UAV的話則可來還原形狀較複雜或是大型建築物。
|
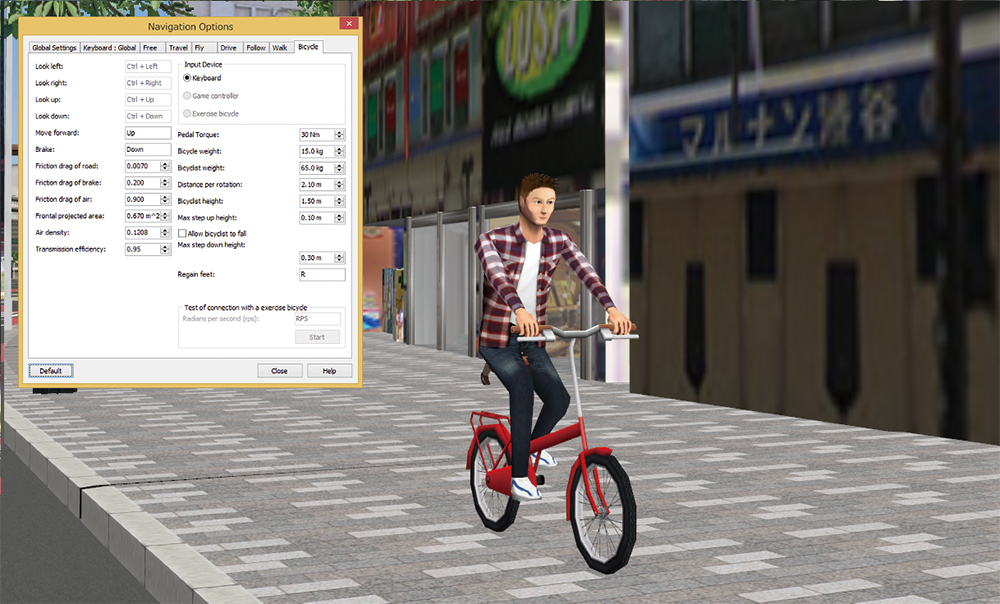
| 自行車模擬 |
本次實裝的自行車模擬將可作為場景製作的一部分。設置部分場景的時候,需要首先設置騎乘的自行車模型與騎乘路線與騎乘開始位置。騎乘路線透過事先設置完成的飛行路線,就可使自行車模型在地面上作正確的騎乘。請使用鍵盤或遊戲控制器來啟動自行車騎乘。 此功能還可對應歷程記錄輸出功能。在模擬中取得的自行車之位置、傾斜角、速度…等訊息皆可進行輸出,將對相關的研究產生關鍵作用。 並且,藉由插件功能,還可與FLOVEL CO.,LTD生產的cycle street腳踏車模擬器作聯動,透過與電腦接續的cycleStreet踏板,自行車可在3D虛擬環境下騎乘行進。透過cycleStreet的踏板旋轉速度,將可作到速度的調節。 |
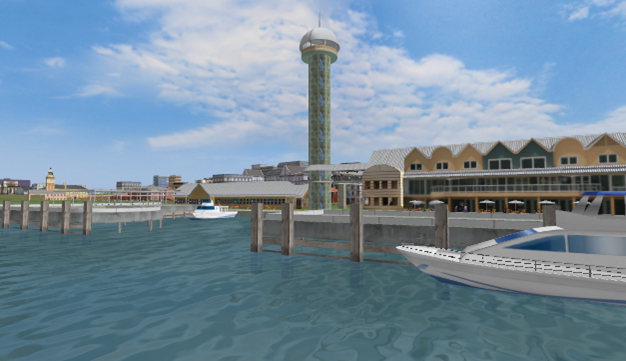
| 更新渲染(繪圖)引擎 |
| 此次更新將影子的可視化功能作了高速化以及品質改良。 除了可對應日照模擬、駕駛模擬外,需要即時性的模擬也可使用,大大增加了立體感與空間沉浸、沒入感。影子的銳度,清晰程度及濃度等皆可進行設置。不但可設置晴天的狀態還可設置陰天狀態的影子。 改善了湖、沼在微波下的顯示精緻度。可動態計算材質、光線反射…等,實現更真實的水波紋表現。 天空的材質製作除了現有的使用材質與方法外,還可藉由將天空作模型模組化後作濁度計算(如彩霞的狀況下),另根據時間計算天空顏色。未來還將擴展雲的模型模組化。 本次更新了內部渲染(繪圖)引擎,確保延展性。畫面渲染(繪圖)方法統一的同時,可提供描繪各個步驟的客製化開發。將來將會使用SDK(開發者套件),追加描繪各步驟(路徑)的前處理、後處理、魚眼鏡頭效果、環境閉鎖、邊緣融合等功能。
|
||||||||||||||
| 文末 |
| 以上為本次UC-win/Road 11的最新功能介紹。 今後也將根據各位的意見,積極改良產品,敬請期待。 |
| (本文刊載於Up&Coming '16 新年号) | ||
 |