Next, LandXML file is imported with UC-win/Road.
Expressing the linear which is optimised via OHPASS can confirm not only in the decided linear, numerical value, image but also as the information visualized with the terrain in 3D environment. It also can be confirmed by even the driving situation.
It is possible to change the cross section in the required area and change the slope and in some cases, the linear itself can also be changed.
Moreover the image of completed actual road can be confirmed by placing the buildings, trees, road signs and others.
Visualizing the VR data allows you to confirm the distance of decided linear, consider the visibility of signs and colors and confirm the outside view during driving. In addition, driving in the VR data enables you to consider and confirm the various situation. The driving according to the change of amount of traffic and wheather can be experienced by settin the scenarios.
 |
 |
|
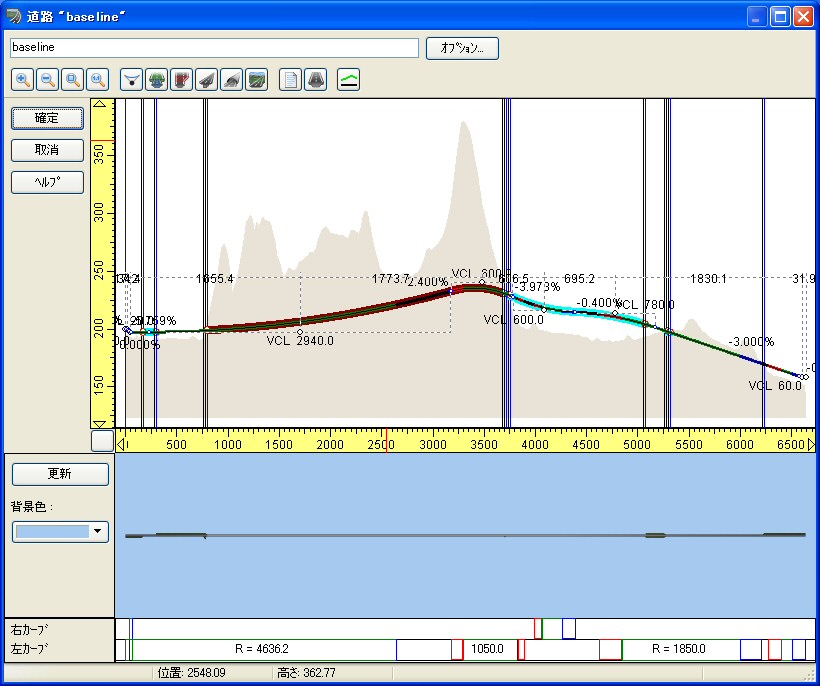
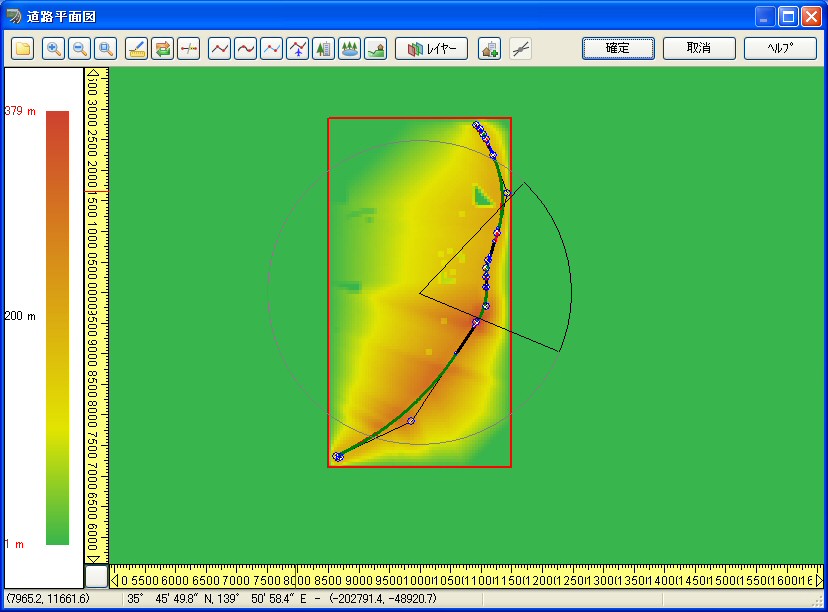
| Figure 1 Longitudinal profile | Figure 2 Screen of plane |
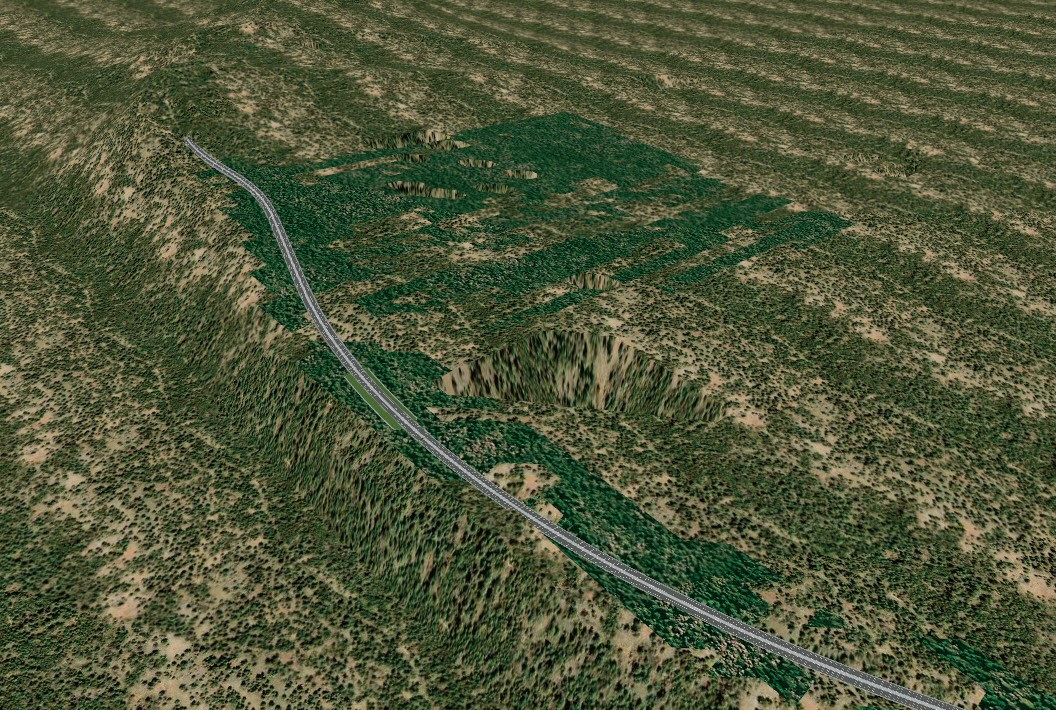 |
| Figure 3 After converting |

