 |
Kinect(TM) 센서 |
HARDWARE INFORMATION
2011-No.2 |
|
|
|
|
|
|
Kinect(TM)센서(이하 키넥트)는 Microsoft사 판매의 가정용 게임기[Xbox360(R)]의 주변 기기로써도 이용되며,
컨트롤러를 사용하는 것이 아니라 신체의 움직임, 제스추어, 음성 등에 의한 조작을 가능하게 하는 디바이스입니다. 카메라나 센서가
탑재되어 있어 키넥트 앞에 플레이어가 서면 자동적으로 플레이어가 인식되도록 되어 있습니다.
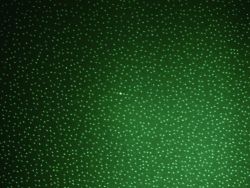
이 기술은 연구 개발 회사, 프라임센스사가 개발한 거리 카메라 테크놀로지를 베이스로 하고 있으며, 센서에는 VGA카메라, 3D스캐너,
4개의 마이크, 경사 모터 등의 기부가 포함되어 있습니다. 3D스캐너는 점패턴을 연속적으로 주는 적외선 레이저 (주파수는 적신호보다
조금 낮음)로 구성되어 있습니다. 레이저는 인간의 눈에 보이지 않지만(파장은 약 780nm), 암시 카메라로 검지할 수 있습니다(그림1a・1b).
 |
|
 |
| ▲그림1a 키넥트 센서의 암시 모드 이미지 |
|
▲그림1b 벽에 투영한 점패턴의 확대 뷰 |
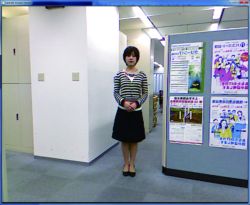
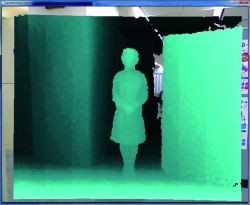
적외선 카메라에 의해 센서와 점과의 거리를 예측하고 주변 환경의 심도 이미지를 작성합니다. 그림2는 각각 카메라 출력 (그림2a),
심도이미지(그림2b), 합성도(그림2c)를 나타내고 있습니다.
| ▼그림2 카메라 피드에 주어진 주변 환경의 심도 이미지 |
 |
|
 |
|
 |
| ▲그림2a VGA 카메라 출력 |
|
▲그림2b 주변 환경의 심도 이미지 |
|
▲그림2c 카메라 출력과 심도 이미지 |
키넥트에는 아래와 같은 기능이 있습니다.
- 모션캡쳐(최대 6명까지)와 제스추어 인식 기능. 제스추어로 인터페이스를 제어 가능
- 표정 인식 기능. 유저를 선택하고 과거에 저장한 설정을 자동 선택
- 음성 인식 기능. 보이스 커맨드의 실행
- 회전 베이스. 최적 트랙킹에 맞추어 센서 경사각을 조절
| ■ UC-win/Road 와 키넥트의 연계에 의한 드라이브 시뮬레이션 |
Open NI API (Open Natural Interaction, http://www.openni.org/)의 사이트로부터 입수할 수 있는 키넥트의 오픈 소스 드라이버를 이용하여 센서와 UC-win/Road를 연계시킴으로써 손을 움직이는
것만으로 드라이브 시뮬레이션의 체험이 가능하게 됩니다. 앉은 위치 또는 선 위치로부터 [가상 핸들]을 잡는 듯한 이미지로 손을
잡습니다(그림3). 이 자세는 실제의 운전 상태와 매우 가깝기 때문에 자연스러운 운전 상태를 유지할 수 있습니다.
 |
| ▲그림3 키넥트에 의한 주행 |
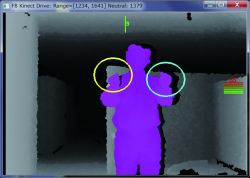
캘리브레이션 실행후, 유저는 차량을 제어할 수 있게 됩니다. 가상 핸들을 회전시켜서 좌회전・우회전의 조작을 할 수 있습니다(그림4a).
 |
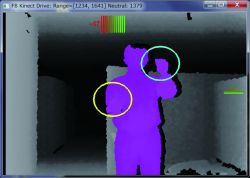 |
| ▲그림4a 가상 핸들을 좌측으로 회전함으로서 좌회전 |
속도 제어는 가상 핸들을 잡고 있는 양손을 전후로 움직임으로써 간단하게 조작할 수 있습니다(그림4b). 이것은 키넥트로부터 양손까지의
거리를 검출함으로써 실시하고 있으며, 팔을 앞으로 내면 액셀, 뒤로 당기면 브레이크가 됩니다.
 |
 |
| ▲그림4b 가상 핸들을 쥔 팔을 앞으로 당김으로써 감속 |
현재 매뉴얼로 캘리브레이션을 실행하고 있지만, 자동 적용시켜 인터페이스가 한층 더 사용하기 쉽도록 개발중입니다.
|
|