주된 특징/기능
 |
|
●모션플랫폼의 필요성
가상현실(VR)에 의해 운전 시뮬레이션을 할 때, 운전자의 감각을 현실에 가깝게 재현하면 할수록 시뮬레이션의 결과를 보다 정확하게
얻을 수 있다는 것은 말할 것도 없습니다. 인간의 감각에는 5종류(시각, 청각, 미각, 후각, 촉각)가 있으며, 거기에 평형 감각을
가하면 전부를 간단하게 재현할 수 있다는 것은 아닙니다.
운전할 때, 가장 중요한 감각은 시각으로, 3차원 VR애플리케이션으로 재현합니다. 청각은 사운드 시스템으로 재현합니다. 운전자가
운전중 미각과 후각을 이용하지 않는다고 해도, 차량의 움직임을 파악하기 위해서는 평형 감각을 필요로 합니다.
현재, 매우 복잡하고 미세한 곳까지 시뮬레이션을 하여 운전자에게 전달하기 위해서 확립된 최첨단 기술로써 모션플랫폼이 있습니다.
반대로, 차량의 움직임이 크게 변동하지 않는 단순한 훈련만을 목적으로 하는 시스템의 경우에는 모션플랫폼은 그다지 중요한 것이 아닙니다.
●모션 재현의 기본
통상 운전자가 감지하는 움직임을 재현하기 위해서는 인간의 감각을 속일 필요가 있습니다. 평형 감각은 몇가지의 정보원으로부터 통합됩니다.
내이(内耳)의 삼반규관(전반규관, 후반규관, 외측반규관)이라고 하는 반규관으로 3차원 회전 가속도를 감지하고, 이석기관(계란형과
구형)으로 수평과 수직의 직선 가속도를 감지합니다.
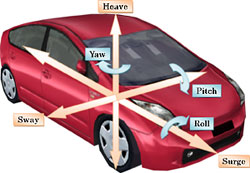
정말로 3차원의 움직임을 파악하기 때문에, 모션플랫폼으로 3차원의 움직임을 재현하지 않으면 안됩니다. 회전과 직선 이동을 수반하는
이러한 움직임에 완전하게 대응하기 위해서는, 2×3축=6자유도(6DOF)가 필요하게 됩니다. 그러나, 모션플랫폼은 실제의 차량보다
한정된 범위에서 동작하기 때문에, 실제의 차량 운동을 그대로 재현시키는 것은 불가능합니다. 이동량이나 속도로 움직임을 파악하는
것이 아니라 주로 가속도로 감지합니다. 그러므로 모션플랫폼은 가속도를 재현하기 위해서 만들어지며, 제어되고 있습니다.
모션 재현 방법으로써는 하기의 기본적인 기술을 이용합니다.
일반적인 6DOF하드웨어 구성은 콕핏 아래에 복수의 액추에이터를 조합한 형태가 됩니다. 이 구성으로 콕핏이 있는 중심점으로부터
전방향으로 이동하여 회전합니다. 중심으로부터의 최대 이동 거리가 모션의 한계가 되며, 시간이 긴 연속적인 이동은 할 수 없습니다.
 |
|
 |
| ▲용어 가이드 |
|
▲6DOF플랫폼 |
이 제한에 대해서, 3개의 대책이 일반적으로 채용되고 있습니다.
- 차량에 있어서 고주파의 가속도를 우선으로 재현합니다.
- 다음 가속도를 재현하기 위해서 운전자가 알아차리지 못하는 속도로 콕핏을 중앙으로 되돌립니다(Washout).
- 콕핏을 기울이면 자연스러운 중력으로 시간이 긴 수평 가속도를 재현합니다. 이 방법에 의해 3DOF(Yaw, Pitch, Heave)의
모션플랫폼으로도 Surge와 Sway를 어느 정도 재현할 수 있습니다.
대형 시뮬레이터에서는, X, Y의 테이블을 이용하여 수평의 레일상에 6DOF구성의 하드웨어를 움직임으로써 수평이 긴 가속도가
개선됩니다. 게다가 Yaw테이블로 콕핏을 수평으로 회전시킴으로써 차량이 꺾이는 상태의 감각이 재현됩니다.
●UC-win/Road에서의 서포트
UC-win/Road의 드라이빙 시뮬레이션 기능의 옵션으로써 INNOSIMULATION,Inc의 OEM형태에 의한 모션플랫폼
하드웨어에 연계시켰습니다. 연계 개발을 위해서는, 소프트웨어를 개량할 필요가 있었습니다. 고성능의 모션을 재현하기 위해서 개발원인
INNOSIMULATION,Inc의 차량 운동 모델, 및 플랫폼의 동작을 제어하는 Washout필터를 채용했습니다. Mechanical
Simulation Corporation개발의 CarSim에 의한 차량 운동 모델을 사용하는 것도 가능합니다.
플랫폼의 불연속적인 움직임을 막기 위해서, 플랫폼의 위치를 100Hz이상의 레이트로 제어하도록 했습니다. 자차의 운동 계산과
함께 플랫폼의 제어를 하고, 연속성을 확보한 움직임의 재현을 할 수 있습니다.
또한, 하드웨어의 안전 그리고 유저의 안전을 지키기 위해서 4단계의 안전 시스템을 구축하고 있습니다.
- UC-win/Road로부터 출력하는 플랫폼의 이동 명령 신호에 이동 가능한 범위 및 안전한 가속도를 넘지 않도록 필터를 걸고 있습니다.
- 하드웨어 장치측에서 다양한 목적을 위하여 이동 명령 신호에 문제가 없는가를 확인합니다.
- 액추에이터 자체에 송신하는 명령 신호의 확인을 하고, 이상한 경우는 액추에이터의 움직임을 강제적으로 멈출 수 있습니다.
- 유저의 판단으로 정지할 수 있도록 긴급 정지 버튼을 준비하고 있습니다.
 |
|
 |
| Size |
2400×1200×615 |
| Weight |
1000kg |
| Operating temperature |
0~35℃ |
| Payload |
800kg |
|
| DOF |
Displacement |
Velocity |
Acceleration |
| Roll |
±8° |
>±60°/s |
>±300°/s |
| Pitch |
±5° |
>±60°/s |
>±300°/s |
| Heave |
±50mm |
>±200mm/sec |
>0.5g |
|
|
|